
Avoiding low obstacles with turtlebot 2 and ASUS xtion pro camera
I'm trying to do autonomous navigation with a turtlebot2 equipped with an ASUS xtion pro but it has a hard time seeing low obstacles. The camera is mounted at 0.43 meters and it only detects obstacles if they are around the same height. The robot can't even detect trash cans that are around 0.3 meters high. The result is that the robot continuously plans paths through these obstacles and ends up getting stuck.
In my costmap_common_params.yaml, I have max_obstacle_height set at 0.6 and min_obstacle_height set at 0.15. Any ideas?
EDIT:
Here is a view of the camera setup:
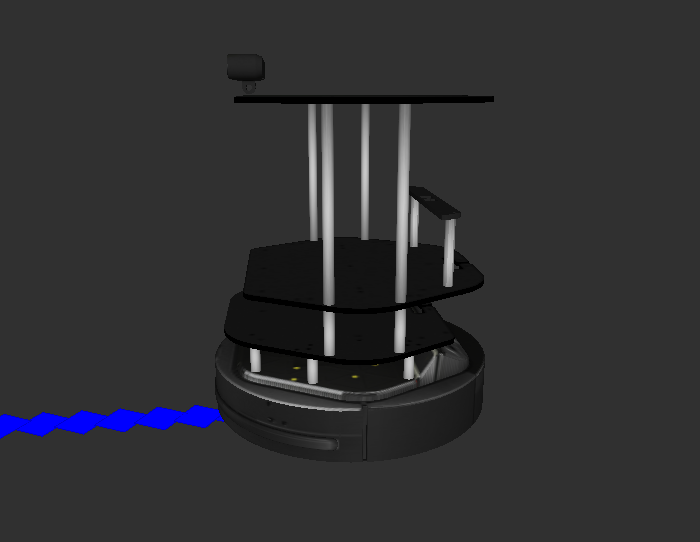


Please add details about your setup, e.g. how do you interface the xtion with the costmap (depthimage_to_laserscan)? And how you mount the xtion.
I'm not sure what you mean by the interface between the xtion and the costmap but I'm using the default settings. I believe I'm using Depthimage_to_laserscan. I edited my question with a picture of the laser setup.
Make sure you are really using depthimage to laserscan. Your xtion is mounted very high and the default of the node is use only the middle of the picture, see 1.3 LaserScan. Note that the costmap is 2d.
I am in fact using depthimage_to_laserscan. I will consider lowering the camera as well. Does the costmap always have to be in 2D? Is this a limitation with the software or with the xtion?