
Cannot visualize the map Hector SLAM [closed]
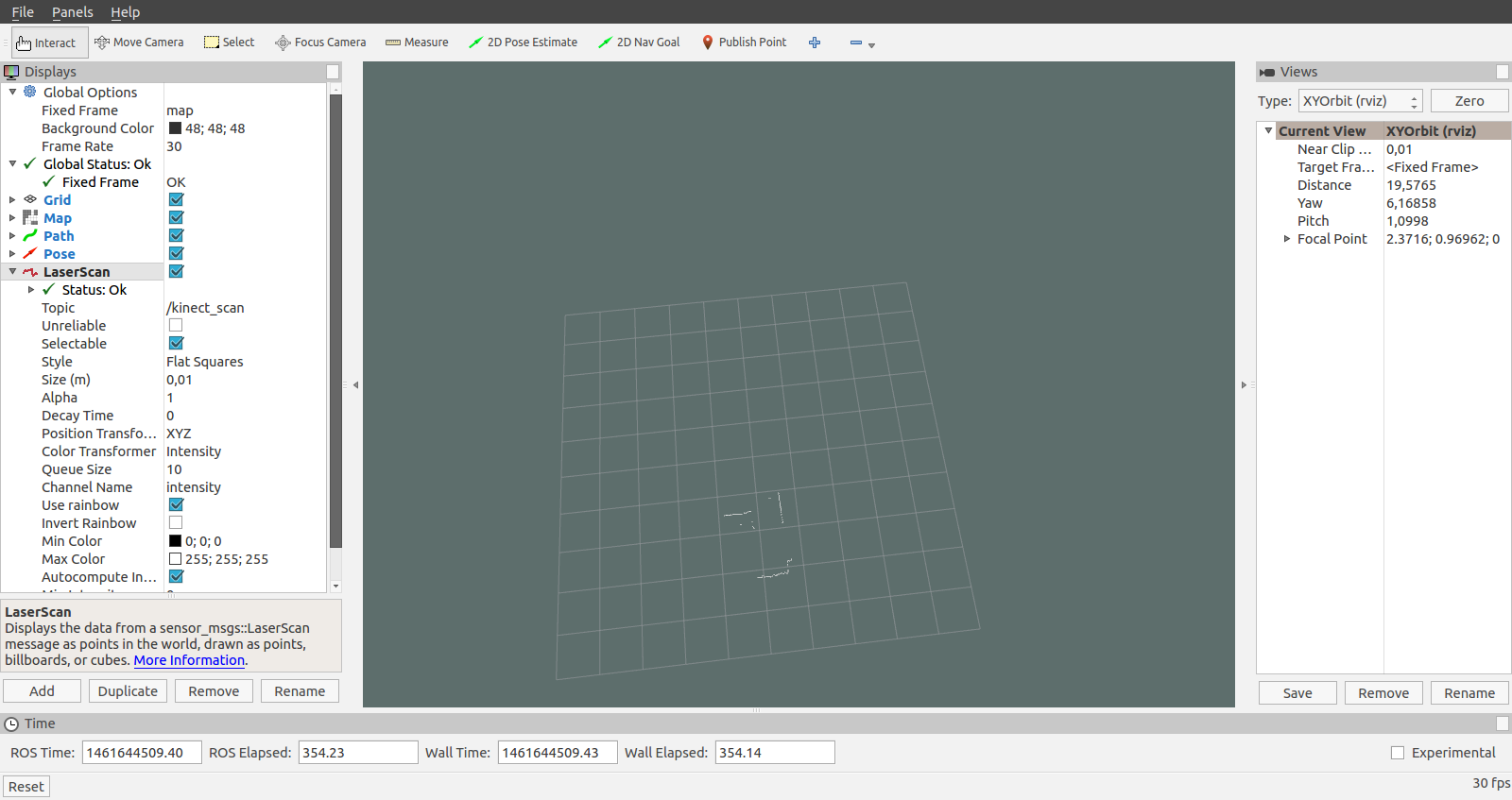
Hi everyone I don't know if I have a problem with the setting of Rviz or I don't set correctly the tf transforms, but this is my problem: Firstable I'am using a kinect to make SLAM process through Hector Slam stack. So I transform the RGB-D info to Laser Scan info using depthimage_to_laserscan package, then I set the necessary tf transforms according to Hector Slam wiki. Everything looks that works fine, but the map cannot be seen on RViz, on the image you can see that it's possible to see the laserscan info but the Mapping process just don't works. Here is my launch file:
<launch>
<include file="$(find freenect_launch)/launch/freenect.launch">
<arg name="depth_registration" value="true"/>
</include>
<!-- Kinect cloud to laser scan -->
<node pkg="depthimage_to_laserscan" type="depthimage_to_laserscan" name="depthimage_to_laserscan">
<remap from="image" to="/camera/depth_registered/image_raw"/>
<remap from="camera_info" to="/camera/depth_registered/camera_info"/>
<remap from="scan" to="/kinect_scan"/>
<param name="range_max" type="double" value="4"/>
</node>
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map"/>
<param name="base_frame" value="base_frame"/>
<param name="odom_frame" value="base_frame"/>
<!-- static tf's -->
<node pkg="tf" type="static_transform_publisher" name="map_2_basef" args="0 0 0 0 0 0 /map /base_frame 100"/>
<node pkg="tf" type="static_transform_publisher" name="basef_2_baselink" args="0 0 0 0 0 0 /base_frame /base_link 100" />
<node pkg="tf" type="static_transform_publisher" name="baselink_2_laserlink" args="0 0 0 0 0 0 /base_link /camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_2_nav_link" args="0 0 0 0 0 0 /base_frame /nav 100"/>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/>
<include file="$(find hector_mapping)/launch/mapping_default.launch"/>
<include file="$(find hector_geotiff)/launch/geotiff_mapper.launch"/>
</launch>
Closed for the following reason
question is not relevant or outdated by
tfoote
close date 2017-04-20 16:16:53.336755
add a comment
