
How to match the map in Rviz with real world map?
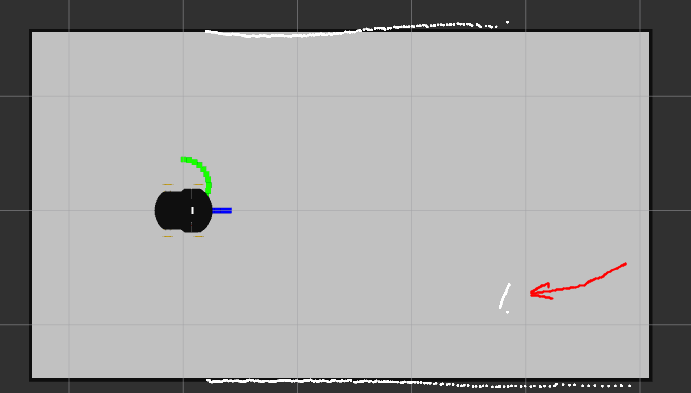
Hi, I'm using Nav2d simulator and launching tutorial2 file. I have changed the original map to another simplified map and using real robot instead of Stage. The problem is that an object is located in left side in real world but in Rviz it shows in right side! I have been looking in configuration file tutorial2.rviz to find a parameter to change (flip over) but I'm not sure which parameter should I change if it already exist !? Or can I do that while Rviz is running ?
add a comment


{kind=link}