
Rosbag record dropping and corrupting data
Hello,
I'm trying to store selected topics being published from various sensors sources (velodyne, monocular camera, IMUs) in a large bag file. I'm able to record the bagfile without seeing any errors. However, when I play back the file, I'm seeing the following errors:
Some of the frames of the Velodyne data are being dropped. I've tried recording multiple bagfiles but I see this behavior in all of them
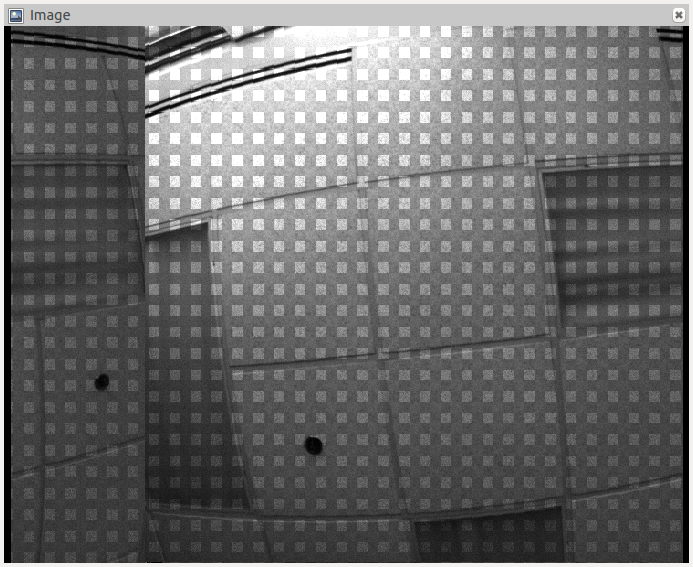
From the monocular camera, I'm just recording the camera/image_raw topic . However, after about a minute into the bagfile, the camera input image splits into 2 unequal part and one of the parts get displaced (as seen in the pictures below). I'm seeing this behavior in most of the bagfiles and the time of split is random.
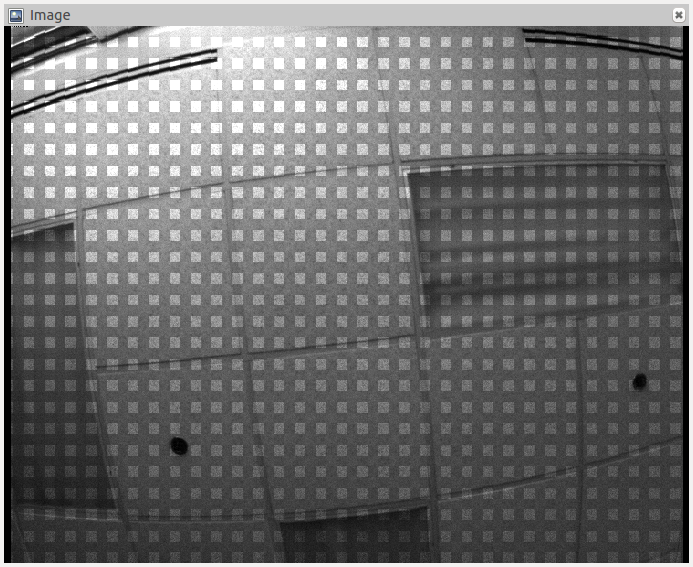
Original Image:
Corrupted Image
A few details about my setup:
- I have tried recording files at 2 buffer sizes 1024 and 0 (infinity) and I see these problems in both cases
- I have tried recording bagfiles on and Odroid XU4 and a high-performance laptop but that did not help
- I'm running ROS indigo on Ubuntu 14.04
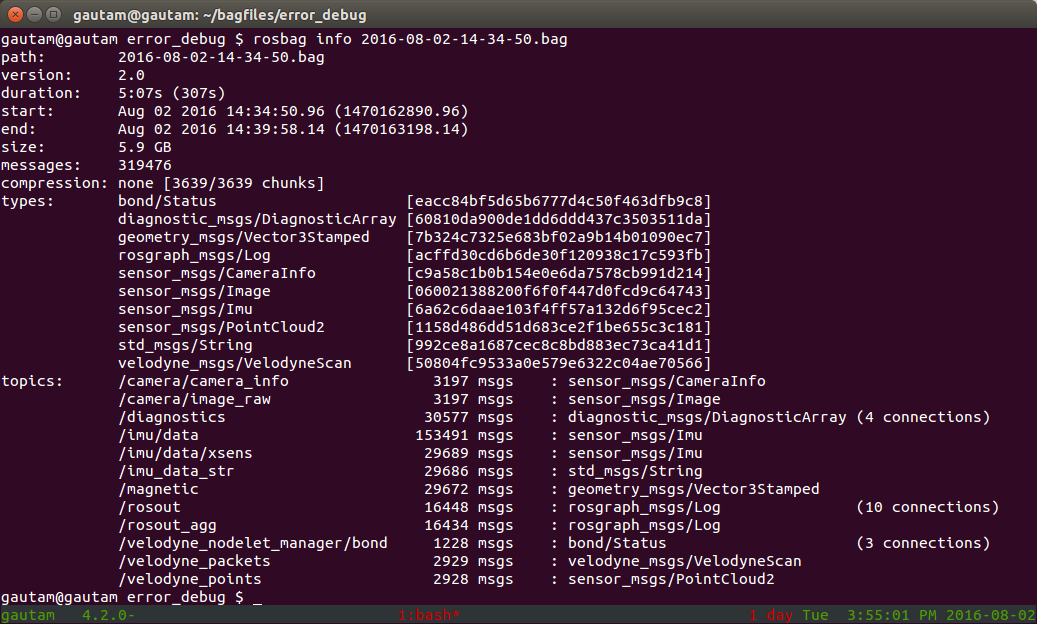
Rosbag info:
I will be happy to provide any relevant info that may be required. Thanks in advance!


rosbag will drop messages if the disk is not fast enough for all of the data. It's surprising that your image data decodes at all with those errors; is it possible the error is actually in the camera driver? Do you see the same issue if you view the camera image live while recording?
it's very unlikely that the error is in the camera drivers as I'm using widely used pointgrey camera drivers without any modification. Yes, I see the issue in the Rviz window while the bagfile is recording. However, I'm yet to see this issue when the bagfile is not being recorded.