
How to simulate a Stewart Platform with ROS?

How to simulate a Stewart Platform with ROS?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
update
I've made a ros node https://github.com/lucasw/simple_sim_ros that is a light wrapper around the bullet physics simulator, and it can create a stewart platform:
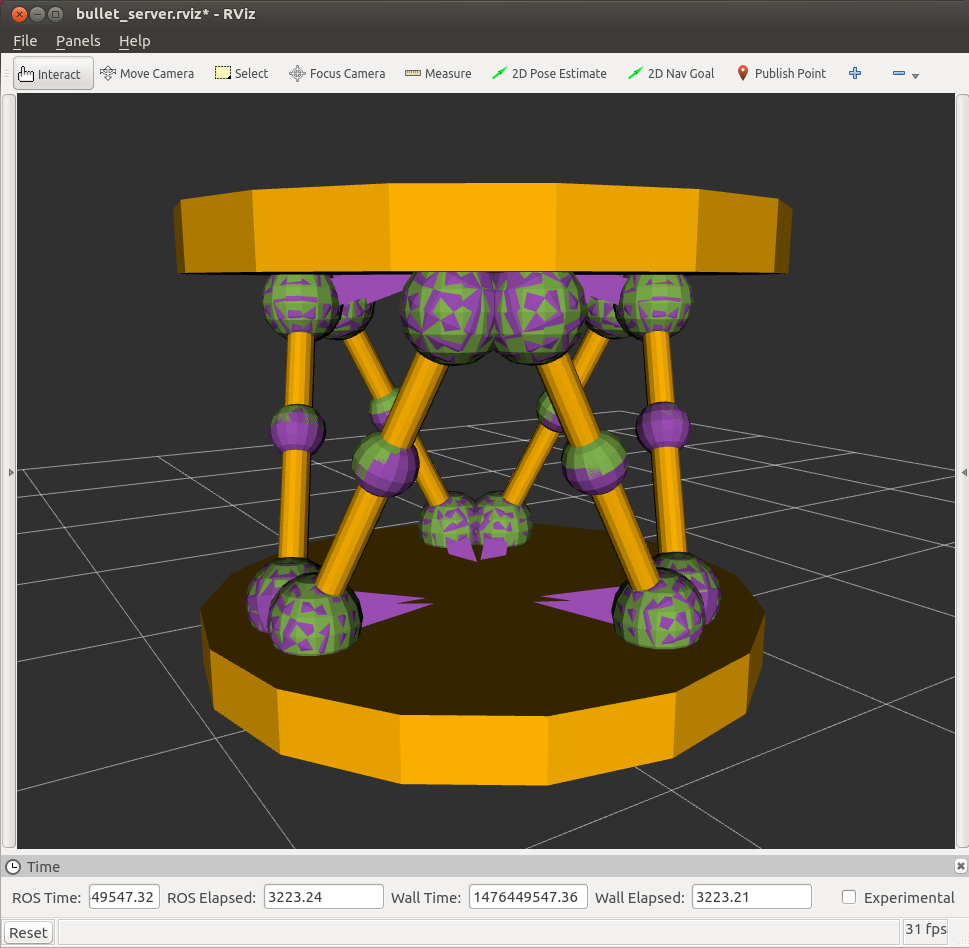
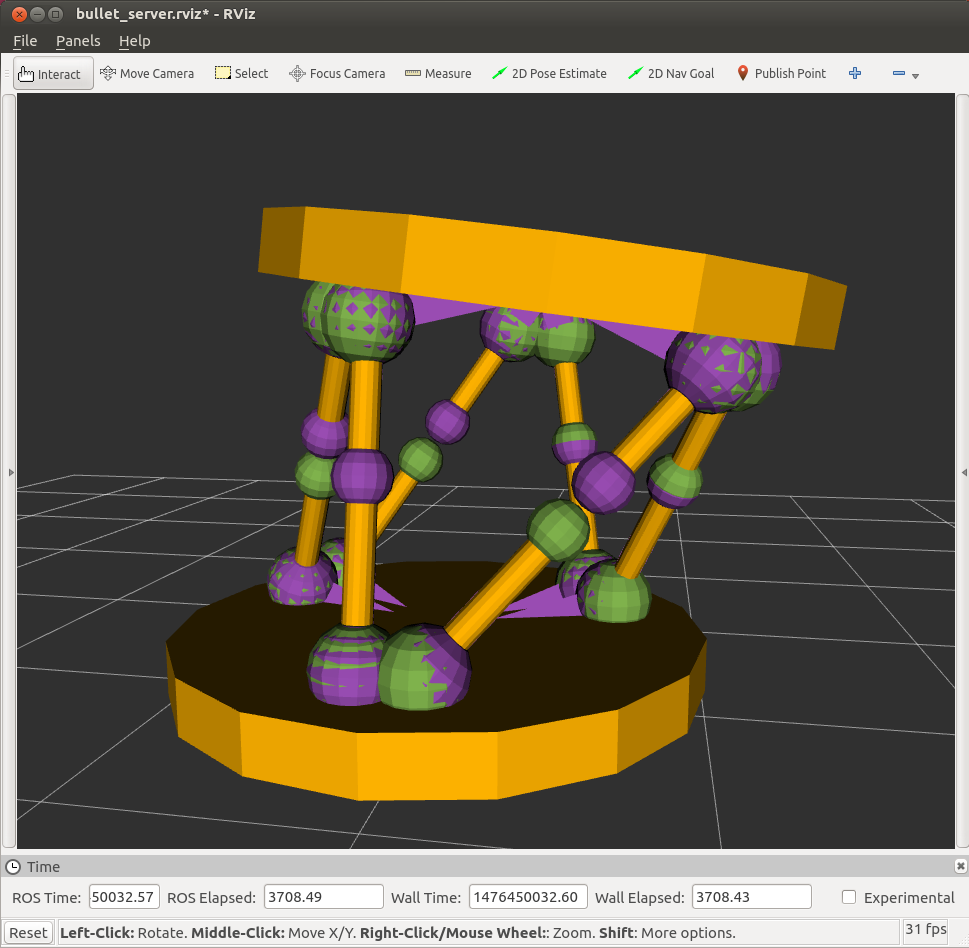
It is lacking important features like closed loop actuator control, currently it can only take impulses rather than actuator extension commands, but I'll add that later.
Old answer
Also http://answers.ros.org/question/21610... and http://answers.gazebosim.org/question...
https://en.wikipedia.org/wiki/Stewart... looks like the platform would involve a tf frame with six parents, but multiple parents aren't allowed in urdf.
Perhaps it is allowed in Gazebo with SDF? In that case you would need to have gazebo-only code/scripts/launch files that launches the platform, then some bridging code that gets transform info from gazebo and publishes it into ros. This could evolve involve a ros-gazebo plugin later, and within urdf the user would specify the general parameters of the platform.
You could do something with Gazebo very hacky and cpu intensive and possibly unstable simulation-wise involving a platform that isn't actually parented to the actuators but is physically constrained by mostly interlocking collision objects.
You could make or perhaps find some off the shelf stewart platform code that solves forward kinematics for the orientation of the platform and the actuators given how much the actuators are extended and run it in a ros node, and that would publish those transforms for the actuators and the platform. (And you already need inverse kinematics solved to make the system useful, though perhaps you were hoping the forward kinematics from a generic simulation would validate your special case inverse kinematics...)
You'll have to git pull to the latest, there are currently only Float32 velocity control topics for the six actuators, publish to /prismatic_0/target_lin_motor_vel and subscribe to /prismatic_0/linear_pos to get position feedback, you'd have to write your own position controller...
Asked: 2016-10-03 12:17:17 -0600
Seen: 2,061 times
Last updated: Oct 14 '16
Is it possible to have memory mapped messages in ROS?
who is heading the development of ROS?
Publisher Subscriber Teleoperation -- High Latency?
How to correctly use git with ROS
detect/extract a "small" sphere using PCL
Implementation of header files??
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
