
Static global map updating


Hi,
I have the ROS navigation stack running on a robot. I can choose a point in RVIZ for the robot to navigate to and it is working well, except for sometimes the robot will start doing clearing rotations because it can't find a route through the global map. I then check the global map and see that obstacles have been put into it even though I have it set to be a static map.
Also in RVIZ the global map sometimes doesn't update until I toggle it off and back on again.
Here is my global_costmap_params.yaml
global_costmap:
global_frame: /map
robot_base_frame: base_link
update_frequency: 5.0
static_map: true
And here is the part of my launch files that loads move_base
<node pkg="move_base" type="move_base" name="move_base" >
<rosparam file="$(find goose_chaser_main)/move_base_config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find goose_chaser_main)/move_base_config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find goose_chaser_main)/move_base_config/local_costmap_params.yaml" command="load" />
<rosparam file="$(find goose_chaser_main)/move_base_config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find goose_chaser_main)/move_base_config/base_local_planner_params.yaml" command="load" />
</node>
Also is there a way to verify that my .yaml file is being loaded?
Update:
I verified that the .yaml file is indeed being loaded by running
rosparam get /move_base/global_costmap/static_map
Which returned: true
Update 2
I am running move_base with the default recovery behavior which includes clear_costmap_recovery, so I'm confused at why this recovery isn't working
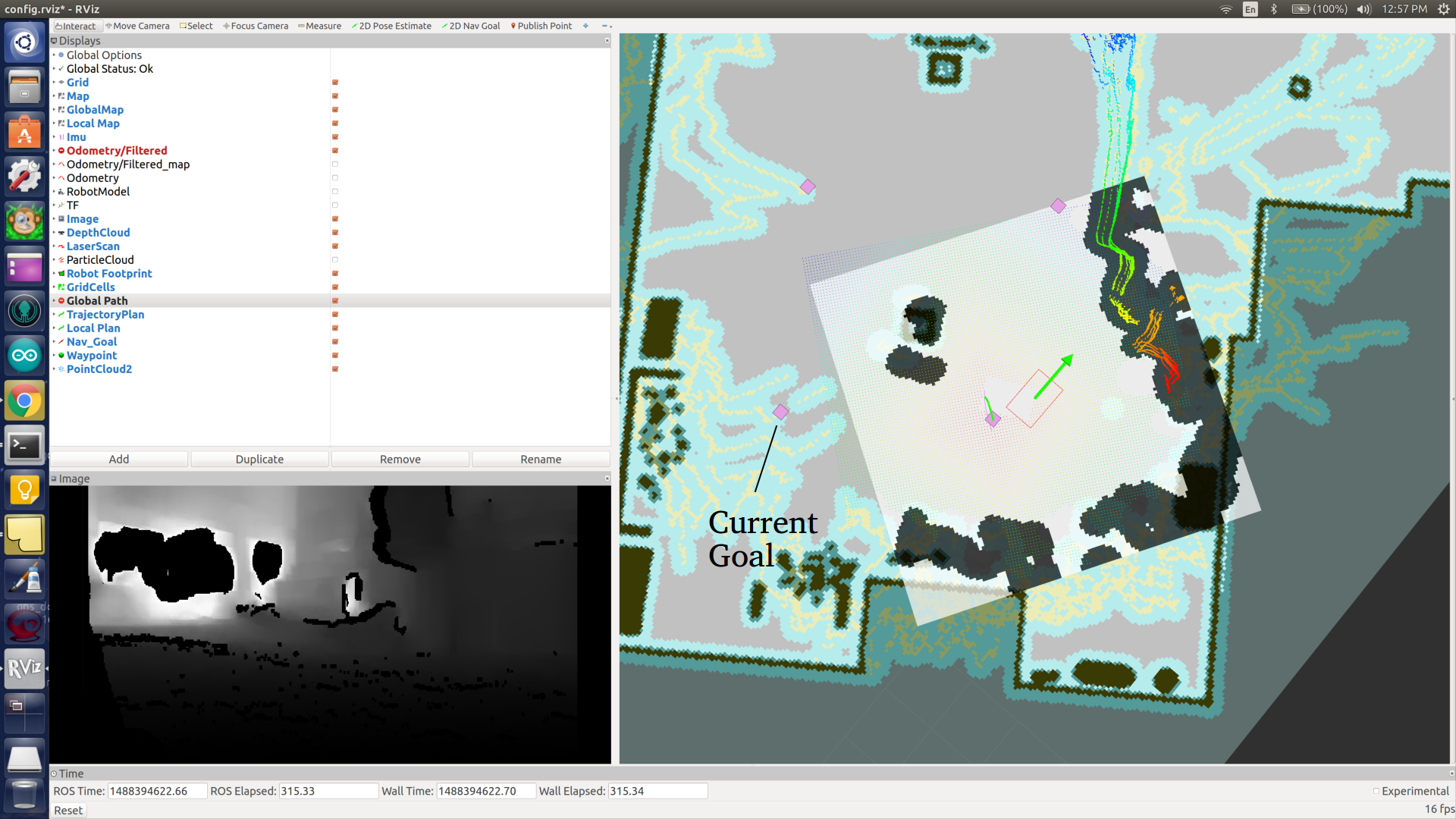
Here is a picture of a situation where my robot failed to find a valid plan
Update 3
Here are my config files:
base_local_planner_params.yaml
local_costmap_params.yaml
global_costmap_params.yaml
costmap_common_params.yaml
