Arduino /cmd_vel and /odom with Pololu motors w/ encoder
Hi guys,
I have been struggling with my robot for 3-4 days now. I want to publish to the /cmd_vel topic and then to the /odom topic using the Arduino MEGA connected to 4 Pololu motors with encoders. I have installed rosserial and gone through the tutorials, I have tried modifying ros_arduino_bridge to fit my hardware with no success, so please do not suggest these as solutions :) I have also tried getting the ticks from the motors with a mild success, but nothing useful. I have tested all motors by sending a variety of PWM signals from the MEGA and they seem to function just fine.
Is it even possible with the motor controllers I am using? I am honestly hoping someone can direct me in the right direction. Everything online is just people linking to the rosserial tutorial page..
My robot is a 4WD platform with
- 4 x 20.4:1 Metal Gearmotor 25Dx50L mm LP 12V with 48 CPR Encoder
- Arduino MEGA to control motors and read encoder values
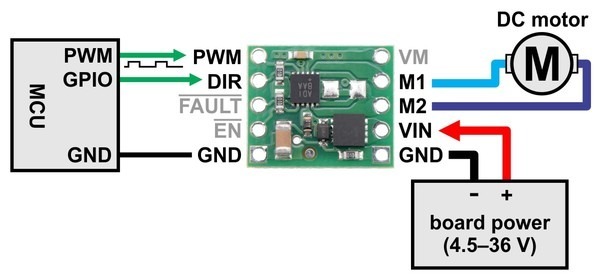
- MAX14870 Single Brushed DC Motor Driver Carrier
- Raspberry Pi 2B as host with ROS Kinetic Kame on Ubuntu Mate 16.04/10
A schematic showing the pinouts of the DC Motor Driver Carrier from the Pololu page