
Accessing rviz view (Camera + Marker) in rospy

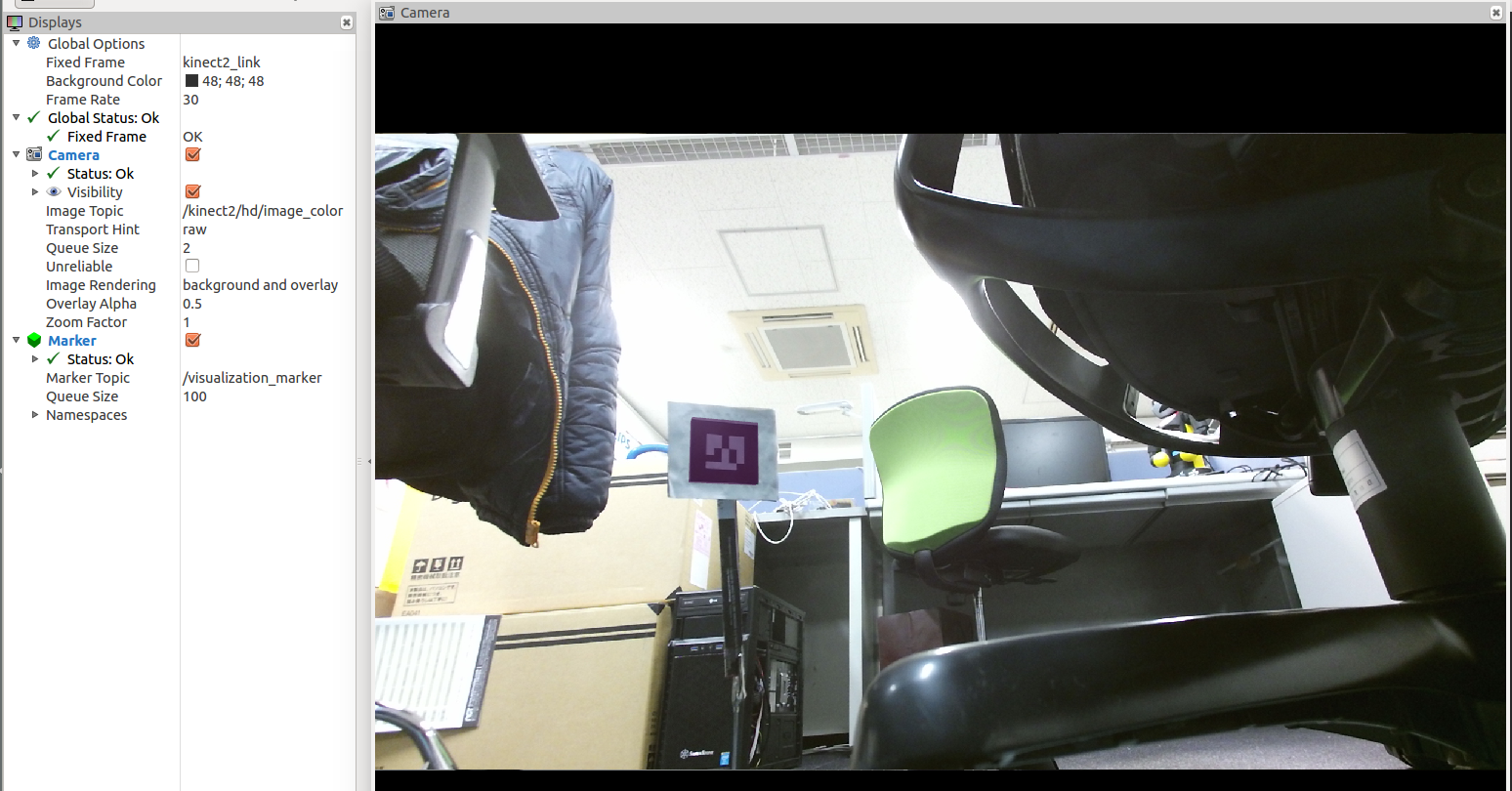
I want to get the rviz view, which is showing me visualization marker on the top of camera view in a single image. Please see below the rviz view:
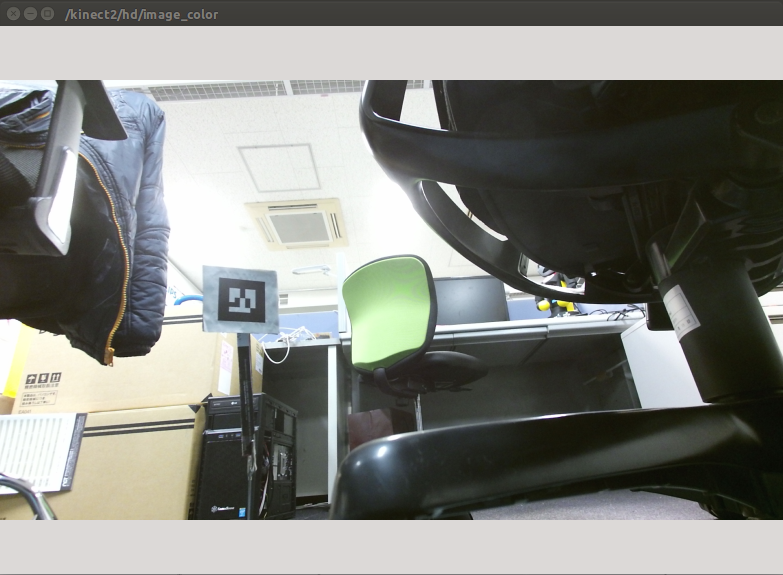
I tried to view the image topic but it doesn't contain any marker image (as expected). Please see below the image:
Later, I echo the rostopic but couldn't get any clue to get the image. Below is the output of rostopic:
$ rostopic echo /visualization_marker
header:
seq: 401
stamp:
secs: 149
nsecs: 462000000
frame_id: kinect2_rgb_optical_frame
ns: basic_shapes
id: 8
type: 1
action: 0
pose:
position:
x: -0.151297542
y: 0.000741795717294
z: 0.44793458834
orientation:
x: 0.95382124573
y: -0.00821160004013
z: 0.241985041143
w: 0.177766252933
scale:
x: 0.045
y: 0.045
z: 0.009
color:
r: 0.5
g: 0.0
b: 0.5
a: 1.0
lifetime:
secs: 1
nsecs: 0
frame_locked: False
points: []
colors: []
text: ''
mesh_resource: ''
mesh_use_embedded_materials: False
I want to get the image (in the form of sensor_msgs/Image) as it is seen in rviz using python in ros.


Does the Marker appear in rviz in the regular 3D view? If so make an rviz Axes and set it to the camera frame_id, and make sure the z-axis is pointed in the general direction of the marker you want to see overlaid on the Image.
If I disable (unselect checkbox) camera, I can see the visualization marker. However it appears bigger and misplaced in the screen. But once I enable camera view, I can see marker in proper place (on the top of camera image)
I am not sure if I understand you completely, but are you looking for a topic with 'rendered' camera+marker images? If so I don't believe it is readily available in rviz..
@huanxiner: Please see the first image in the question. This image is being displayed by rviz. Notice that the identified marker has been colored in this picture by rviz. I want to get this image (including the colored/detected marker) in ros python code.