
Why am I getting a nullptr from my bag file?
I am playing back a bagfile and I get a nullptr when I should be getting actual data.
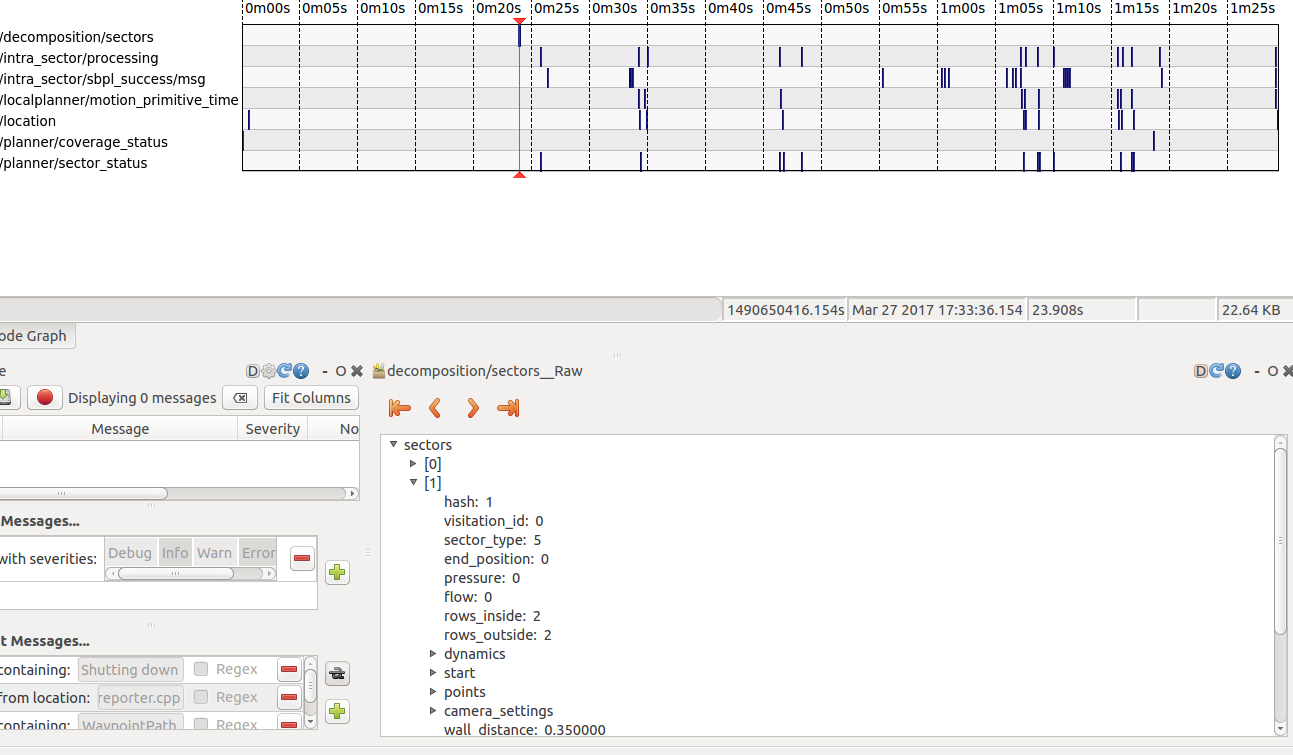
Below is a screenshot of the bagfile being viewed from RQT. There is only one message called "decomposition/sectors" and I am certain that it should have data. Yet, when I am playing back the bag file in C++ code for a unit test, I get a nullptr for this particular item. Why am I getting this? The other messages will be properly read and instantiated, but not this one.
Here is a snippet of code which shows how I am reading this:
void CoverageReporterTester::SendMessage(const rosbag::MessageInstance& bag_msg)
{
if (topic_name == avidbots_topics::decomposition_sectors)
{
message_stack::sector_array msg1 = *bag_msg.instantiate<message_stack::sector_array>();
SendMessage(topic_name, msg1);
}
}
/* Read bag file */
rosbag::Bag bag_file;
std::string bag_dir = ros::package::getPath("coverage_reporter") +
"/test/data/bag_files/coverage_reporter.bag";
bag_file.open(bag_dir, rosbag::bagmode::Read);
/* List of topics we are interested in */
std::vector<std::string> topics;
topics.push_back(topics::decomposition_sectors);
topics.push_back(avidbots_topics::static_3d_costmap_topic);
rosbag::View view(bag_file, rosbag::TopicQuery(topics));
/* Loop through each message in the bag file which is associated with one of our topics listed above */
foreach(rosbag::MessageInstance const bag_msg, view)
{
coverage_reporter.SendMessage(bag_msg);
}
add a comment
