
GPS waypoint navigation with Jackal

I have a the UGV "Jackal" from Clearpath Robotics. My Task is to let the robot follow a predetermined path (given in UTM -Coordinates). The robot has already GPS, IMU and odometry implemented. The robot_localization package is also already installed and preconfigured.
To let the robot navigate autonomously, I would like to use the move_base package. Therefore the goals (move_base/goal or move_base_simple/goal) have to be "in the robots world frame, or a frame that can be transormed to the world frame" (see Answer for this question).
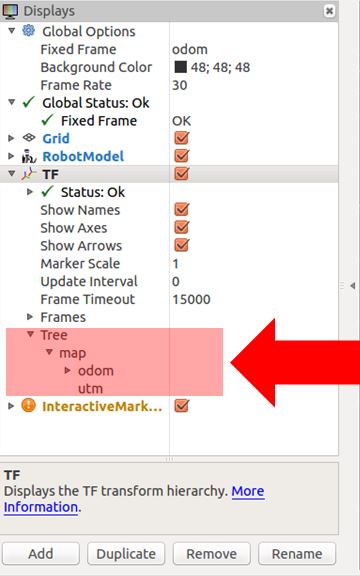
The robot_localization package should provide a transform from world_frame->utm. But when I start the robot outside, I cant't see this transformation in the tf node. Because of that I can't send goals to the move_base node with frame_id utm I think.
My Questions are now:
- Where can I check that the
navsat_transform_nodeprovides the world_frame -> utm transformation? - How should I configure the
move_basenode that he will accepts goals in the utm-frame? (I know this is a very open question, but I am very glad for every tip.)
Thank you for your help and support.


Hello.. I am facing the same issue with my Jackal robot. Could you please help me to resolve this. I also need to send the jackal robot to follow certain GPS waypoints. I have all the Jackal packages installed. I launched the base.launch, move_base.launch and Rviz view_robot.launch. Have added the below "robot_localization" inside the base.launch and I made "broadcast_utm_transform=true" .
<node pkg="robot_localization" type="navsat_transform_node" name="navsat_transform" >="" <rosparam=""> magnetic_declination_radians: 0 roll_offset: 0 pitch_offset: 0 yaw_offset: 0 zero_altitude: false broadcast_utm_transform: true </rosparam> </node>
But I am not able to see the UTM under the tree. Please help...