
AMCL not localizing in pre-built map
I'm using AMCL with a Velodyne VLP-16. I'm using hector_slam to build the map, saving the map with map_server.
I'm using an IMU and wheel encoder velocities (twist messages) to fuse with robot_localization for odometry and the odom->base_link (base_footprint in my case) transform.
I want to use AMCL for global localization, but I'm having problems. AMCL is not aligning the laser scan with the prebuilt map, leading to incorrect global localization. I've attached a screenshot (if you rotate the laserscan by ~90 degrees clockwise, you get the about the correct alignment.
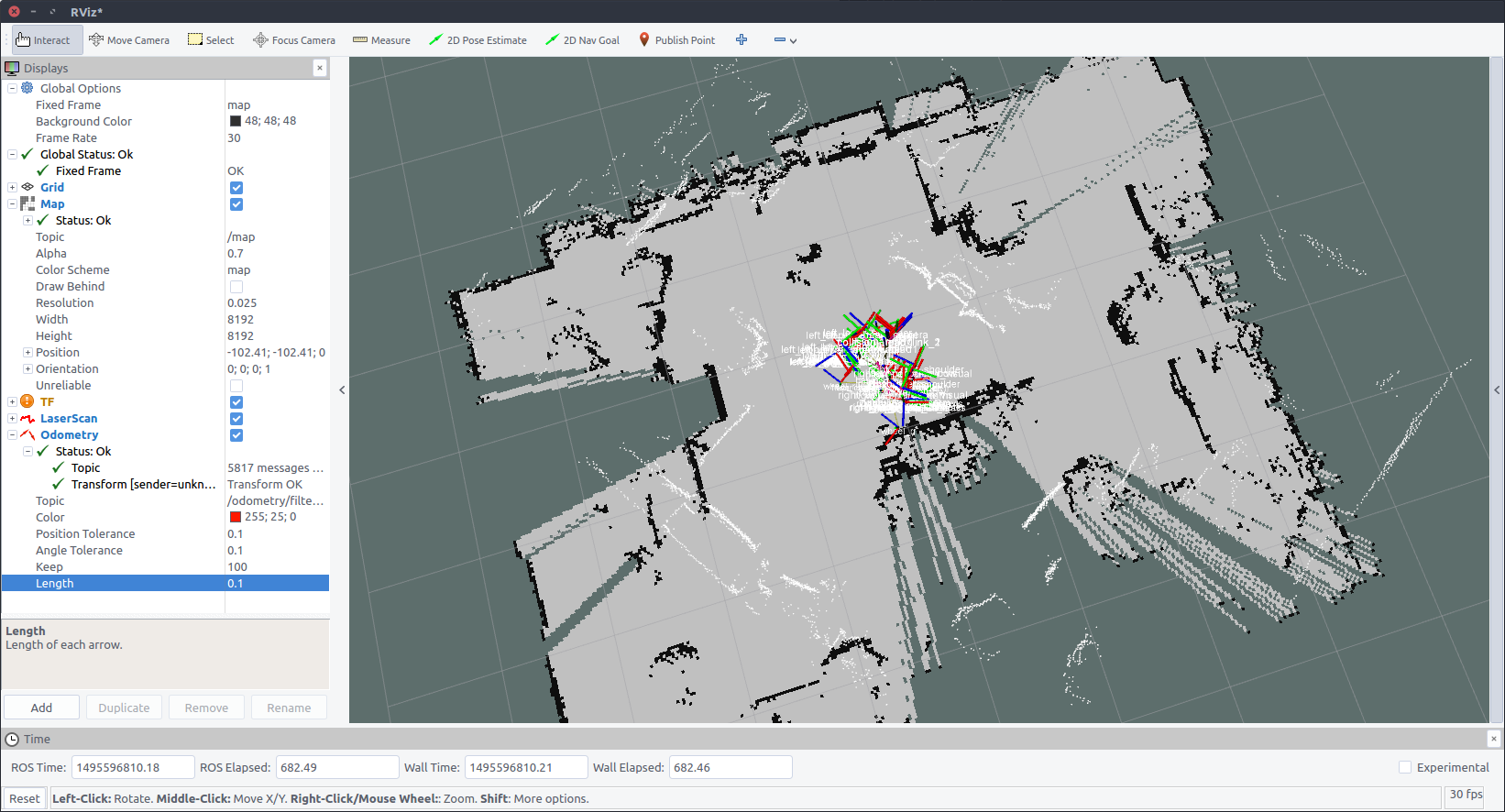
The only potential problem might be that the laserscan is flat in the velodyne's frame, which is ~0.35m above the ground. Could that be an issue for AMCL?
I'm not very sure where to start debugging this, so any tips/hints/suggestions/requests for more info would be appreciated. I didn't want to dump my entire config in the first post, but I'm more than willing to.
And my AMCL config is pretty standard:
<launch>
<node pkg="amcl" type="amcl" name="amcl">
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="omni"/>
<param name="odom_frame_id" value="odom" />
<param name="base_frame_id" value="base_footprint" />
<param name="global_frame_id" value="map" />
<param name="use_map_topic" value="true" />
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.2" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="30"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.5"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
</node>
</launch>


How far did you travel without localization?
Less than 2 meters. Should I travel farther to get a global alignment?
I only observed small updates with amcl, try to drive a few times in circle
Also was your 2d pose estimate as accurate as you could?
If I properly set the initial pose, it works, but this seems counterintuitive to me. The point of global localization is to align the sensor measurement to a prebuilt map. It seems amcl is really just keep the map roughly in place, but is incapable of a large adjust. Why is this the case? Thanks!
Does this answer help you?
Yes, thank you. Makes sense.