
Ar drone - camera transparent images [closed]
Hello,
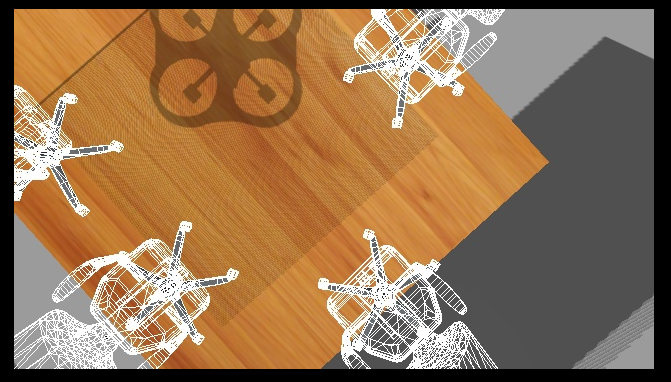
I am using a python script to control the tum ar drone. I have prepared an environment in gazebo, in which the drone flies and captures the image. However, in the image my camera captures, the chairs and other objects are transparent. I have included the images from the camera below: 1- during the experiment, 2 - saved to .png using below callback
def front_image_callback(self, msg):
try:
# Convert your ROS Image message to OpenCV2
cv2_img = CvBridge().imgmsg_to_cv2(msg, "bgr8")
except CvBridgeError, e:
print(e)
else:
# Save OpenCV2 image as a jpeg
cv2.imwrite('front_camera/image_{}.jpeg'.format(self.k), cv2_img)
self.k += 1
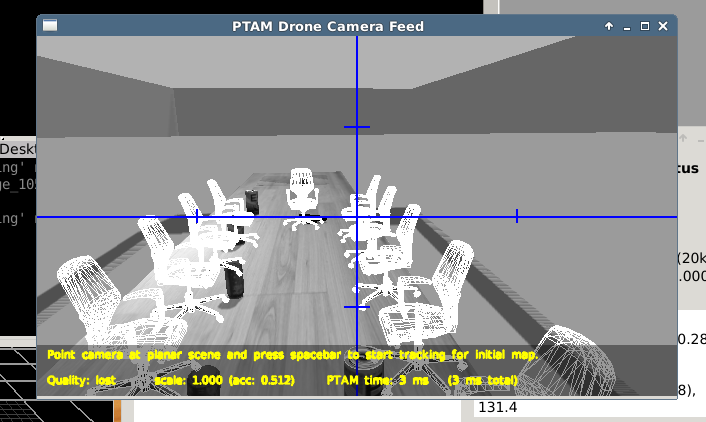
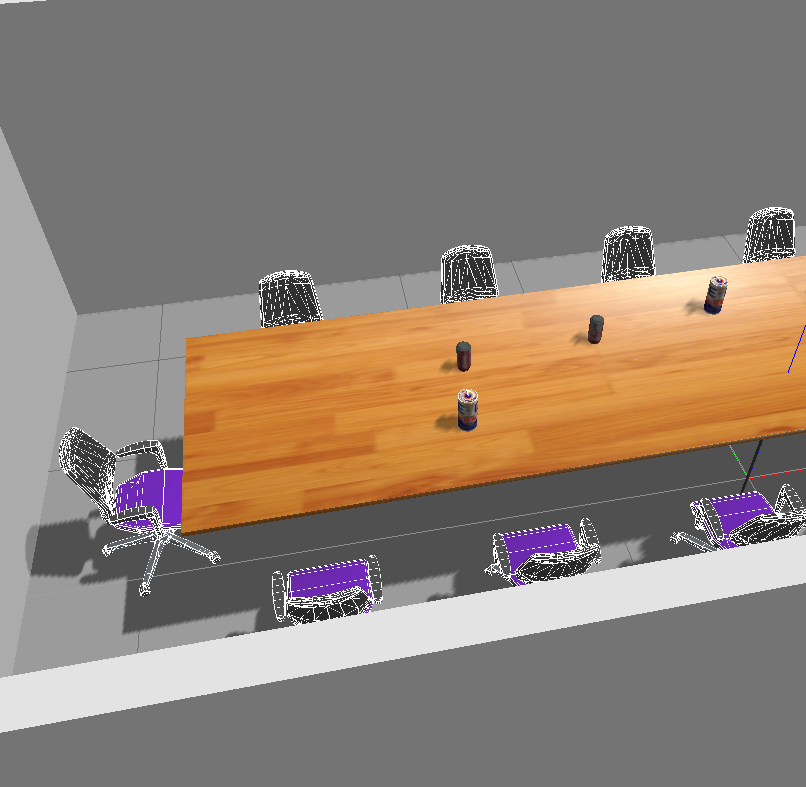
Does anybody have an idea how can I update the camera not to be transparent? In my gazebo world, everything is normal, as shown in this image:

They're not transparent, but rendered only as wireframes.
I would say they look strange in Gazebo as well. Not sure if that is related.
Is there something that looks strange in Gazebo to you, except the wireframes of the chairs?
Do you know how one can turn off wireframes in Gazebo? ;)
or maybe you know any other normal Gazebo chair models? I am having troubles finding them.
I'm not much of a Gazebo user, so I haven't run into any of this.
This is either a Gazebo issue, or a problem with the camera plugin (
gazebo_ros_pkgs). If the former, you should probably ask about it over atanswers.gazebosim.org. The latter would be a ROS issue.I think it might be something with the camera, because in the second picture there should be a green square below the drone (which is possible to see in gazebo)
Do you have any ideas on where can I try changing the camera output?