
RTABMAP non-overlapping 3D cloud
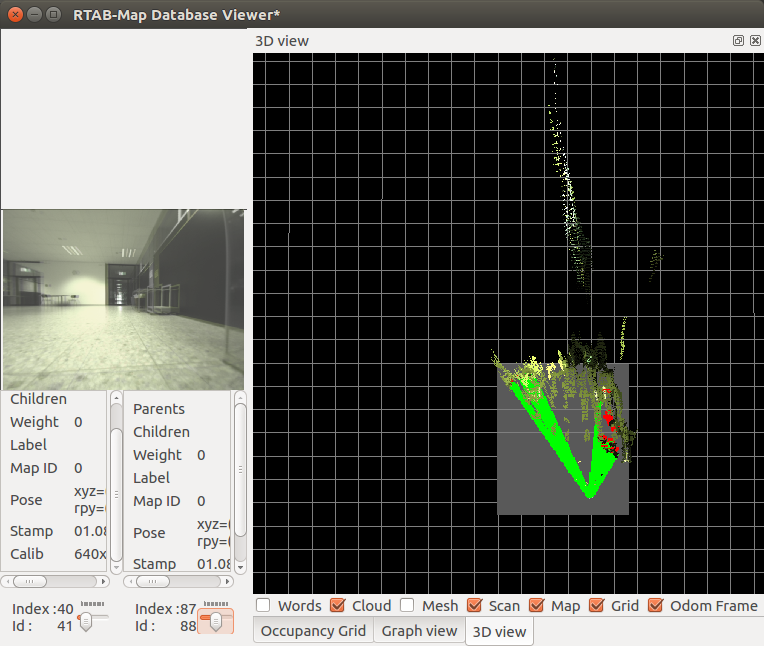
Hi, I am using rtabmap using stereo on a robot. Everything seems to work fine, except that the MapCloud does not contain registered clouds. The individual 3D maps (from different graph nodes) "supposedly" are not registered to each other. For example there are multiple (3 or 4) replica of the same scene which are not registered. Here are some details.
- ROS Indigo on Ubuntu 14.04
- rectified/synchronized stereo being published at 15Hz
- odometry available (approx_sync, enabled when using wheel odometry)
- rtabmap database: https://www.dropbox.com/sh/vtp0xao60f...
- launch file https://www.dropbox.com/s/eiumj3fzs7b...
Please help, thanks!



Could you give us details on how you launched RTABMap, what ROS topics you're having difficulties with, the result of view_frames ?
I would say the problem is with the cloud data (mapping result), everything else seems to work perfect! And I am launching using the "stereo_mapping.launch" file, with minor modifications (like topic names etc) ps. all the demos work as expected
If you can share the resulting database (dropbox or google drive link), it can be useful.
here is a link to the launch file i used and the rtabmap database database https://www.dropbox.com/sh/vtp0xao60f... launch file https://www.dropbox.com/s/eiumj3fzs7b...