
Navigation planning too near to obstacles
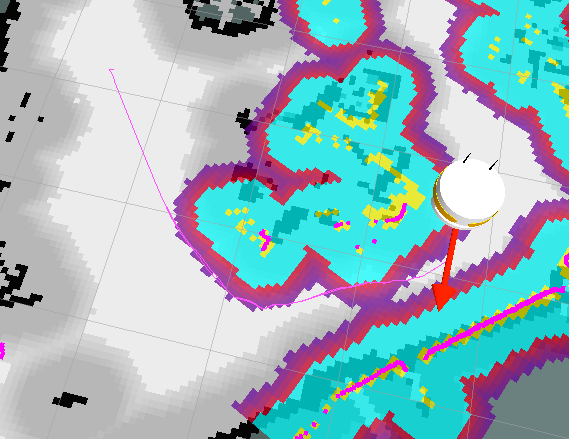
I'm using the following configuration in my navigation stack, but as you can see in the image, the planner picks paths too close to the obstacles, so it could get stuck.
I'm using NavfnROS as global planner and DWAPlanner as local planner. I used this guide to configure my navigation, specially cost_scaling_factor (low theoretically means further from obstacles) and inflation_radious(higher means further from obstacles too). I've picked
inflation radius = 0.45, cost scaling factor = 3.0
, but changing cost_scaling doesn't help much. Higher inflation_radius improves everything, but can't go through narrow corridors.
I'll put here my configuration, but keep in mind I've used DWA as localplanner in my launch (even though TrajectoryPlannerROS is configured, it shouln't use it, right?)
Costmap_common.yaml
footprint: [[-0.26, -0.26], [-0.26, 0.26], [0.26, 0.26], [0.26, -0.26]] #Se puede aumentar para seguridad
footprint_padding: 0.01
#robot_radius: 0.26
robot_base_frame: base_footprint
update_frequency: 4.0
publish_frequency: 3.0
transform_tolerance: 10.0
resolution: 0.05
obstacle_range: 2.5
raytrace_range: 3.0
#layer definitions
static:
map_topic: /map
subscribe_to_updates: true
obstacles_laser:
observation_sources: laser
laser: {data_type: LaserScan, clearing: true, marking: true, topic: scan, inf_is_valid: true}
inflation:
cost_scaling_factor: 3.0 #It was 10.0 before
inflation_radius: 0.45 #Before 0.35
Costmap_global_static.yaml
global_frame: map
rolling_window: false
track_unknown_space: true
plugins:
- {name: static, type: "costmap_2d::StaticLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
Costmap_local
global_frame: odom
rolling_window: true
plugins:
- {name: obstacles_laser, type: "costmap_2d::ObstacleLayer"}
- {name: inflation, type: "costmap_2d::InflationLayer"}
Planner.yaml
controller_frequency: 10.0
recovery_behaviour_enabled: true
NavfnROS:
allow_unknown: true # Specifies whether or not to allow navfn to create plans that traverse unknown space.
default_tolerance: 0.1 # A tolerance on the goal point for the planner.
TrajectoryPlannerROS:
# Robot Configuration Parameters
acc_lim_x: 0.8
acc_lim_theta: 1.67
max_vel_x: 0.3
min_vel_x: 0.1
max_vel_theta: 1.0
min_vel_theta: -1.0
min_in_place_vel_theta: 0.2#0.4
holonomic_robot: false
escape_vel: -0.1
# Goal Tolerance Parameters
yaw_goal_tolerance: 0.2
xy_goal_tolerance: 0.3
latch_xy_goal_tolerance: false
# Forward Simulation Parameters
sim_time: 2.0
sim_granularity: 0.02
angular_sim_granularity: 0.02
vx_samples: 10 #Antes estaba a 6, asi puede necesitar mas procesamiento pero ira mejor
vtheta_samples: 20
controller_frequency: 10.0
# Trajectory scoring parameters
meter_scoring: true # Whether the gdist_scale and pdist_scale parameters should assume that goal_distance and path_distance are expressed in units of meters or cells. Cells are assumed by default (false).
occdist_scale: 0.1 #The weighting for how much the controller should attempt to avoid obstacles. default 0.01
pdist_scale: 0.6 # The weighting for how much the controller should stay close to the path it was given . default 0.6
gdist_scale: 0.8 # The weighting for how much the controller should attempt to reach its local goal, also controls speed default 0.8
heading_lookahead: 0.325 #How far to look ahead in meters when scoring different in-place-rotation trajectories
heading_scoring: false #Whether to score based on the robot's heading to the path or its distance from the path. default false
heading_scoring_timestep: 0.8 #How far to look ahead in time ...
Please attach your image directly to your question. I've given you enough karma to do so.
Thank you, I couln't upload the image because of that
Is the issue just in simulation or IRL? I'm not an expert, but IRL I had success by increasing inflation radius and artificially decreasing the foot print. By doing this, the planner would not freak out and do weird things near the corner. Can navigate doorways smoothly without hitting anything.
@billy The issue happens IRL. It gets stuck because of local inflation (robot is going too near to the wall and a little error in laser inflates just in the middle of path) but not hitting the things. Then I think the problem is because of global planner. Is another global planner better for that?