
Turtlebot Transforms Error
I am working with the Turtlebot 2.0 and am just running the robot_with_tf.launch file provided by Kobuki. When I check my tf tree I get this:
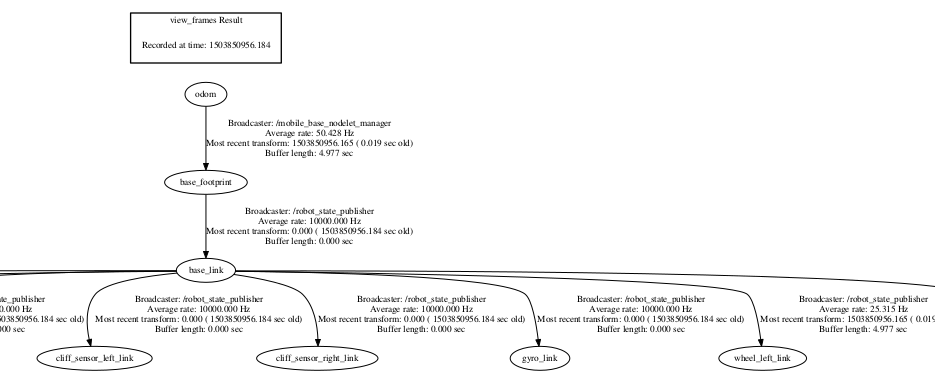
So from this partial view of the tree, the odom publishes to base_footprint properly, but base_footprint does not publish to base_link properly. I am not sure how to fix this. I tried creating my own static transform from base_footprint to base_link with:
<node pkg="tf" type="static_transform_publisher" name="tf_base_footprint" args="0 0 -0.0352 0 0 0 base_footprint base_link 10" />
However, this did not solve the problem and I got the same tf tree. Any help or guidance would be much appreciated, thank you!
add a comment
