
rtabmap process crashing, [rtabmap_ros with realsense ZR300]

Hi,
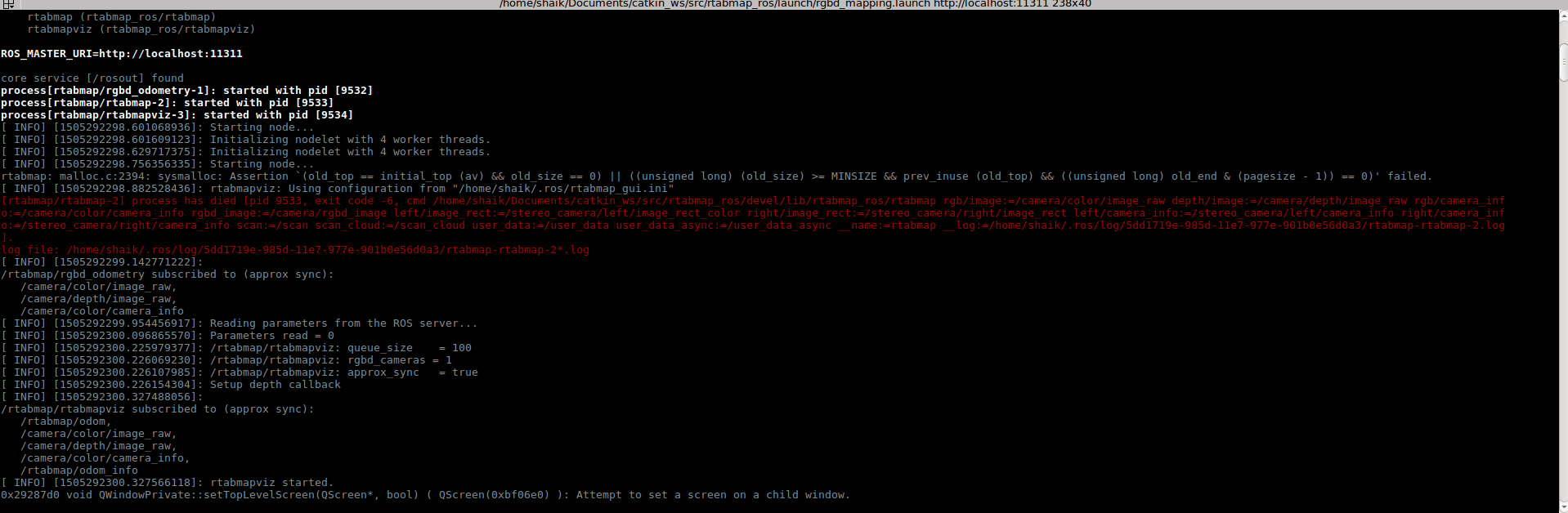
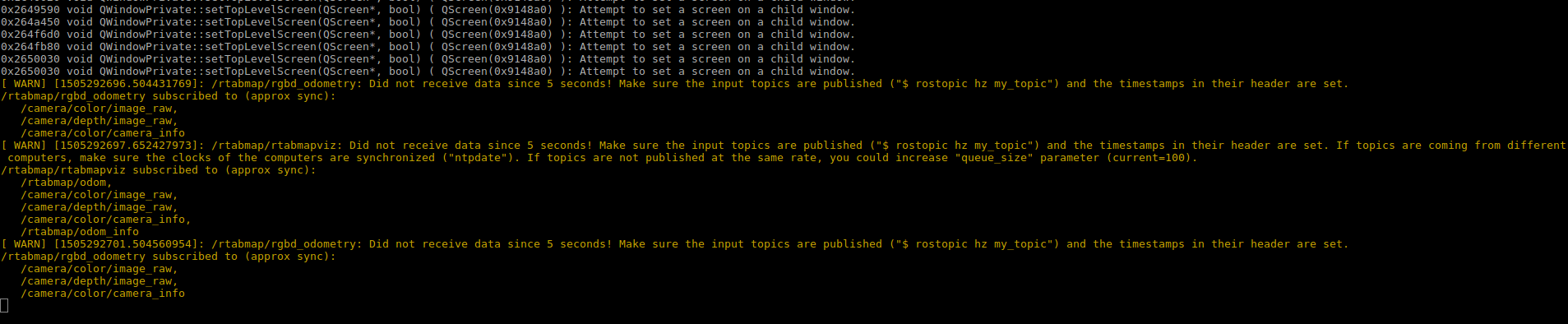
I am trying to use rtabmap_ros package with realsense ZR300 camera. After roslaunch one of the rtabmap process is crashed and the GUI visualization is empty. I have build both realsense_camera and rtabmap_ros from source.
Procedure I followed:
roslaunch realsense_camera zr300_nodelet_default.launch
roslaunch rtabmap_ros rgbd_mapping.launch
I have added the screenshot of the error. Looking for suggestions to solve the error.
Thanks.
Errors:
Debug info :
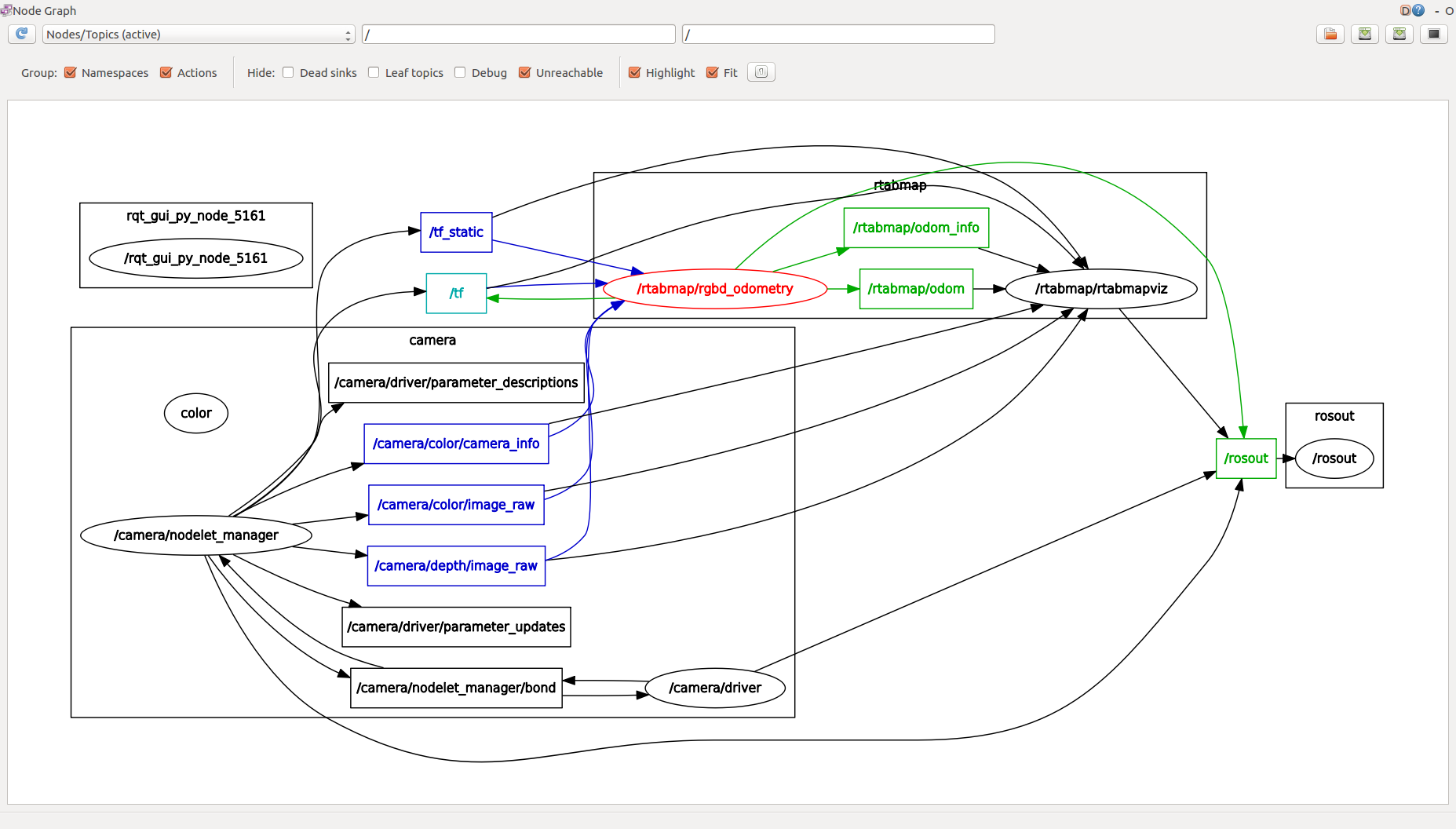
rqt_graph:
roswtf:
Loaded plugin tf.tfwtf
No package or stack in context
================================================================================
Static checks summary:
No errors or warnings
================================================================================
Beginning tests of your ROS graph. These may take awhile...
analyzing graph...
... done analyzing graph
running graph rules...
ERROR: connection refused to [http://i-ssrc-ws-13:40681/]
... done running graph rules
running tf checks, this will take a second...
... tf checks complete
Online checks summary:
Found 4 warning(s).
Warnings are things that may be just fine, but are sometimes at fault
WARNING The following node subscriptions are unconnected:
* /rtabmap/rtabmapviz:
* /rtabmap/info
* /rtabmap/global_path
* /rtabmap/mapData
* /rtabmap/goal_reached
* /rtabmap/goal_node
* /rqt_gui_py_node_5161:
* /statistics
WARNING The following nodes are unexpectedly connected:
* /camera/nodelet_manager->/roswtf_9415_1505292273588 (/tf)
WARNING These nodes have died:
* rtabmap/rtabmap-2
WARNING No tf messages
Found 2 error(s).
ERROR Could not contact the following nodes:
* /rtabmap/rtabmap
ERROR Errors connecting to the following services:
* service [/rtabmap/rtabmap/list] appears to be malfunctioning: Unable to communicate with service [/rtabmap/rtabmap/list], address [rosrpc://i-ssrc-ws-13:54771]
* service [/rtabmap/rtabmap/load_nodelet] appears to be malfunctioning: Unable to communicate with service [/rtabmap/rtabmap/load_nodelet], address [rosrpc://i-ssrc-ws-13:54771]
* service [/rtabmap/rtabmap/get_loggers] appears to be malfunctioning: Unable to communicate with service [/rtabmap/rtabmap/get_loggers], address [rosrpc://i-ssrc-ws-13:54771]
* service [/rtabmap/rtabmap/set_logger_level] appears to be malfunctioning: Unable to communicate with service [/rtabmap/rtabmap/set_logger_level], address [rosrpc://i-ssrc-ws-13:54771]
* service [/rtabmap/rtabmap/unload_nodelet] appears to be malfunctioning: Unable to communicate with service [/rtabmap/rtabmap/unload_nodelet], address [rosrpc://i-ssrc-ws-13:54771]
add a comment

