
Reverse recovery behavior for stuck non circular robots
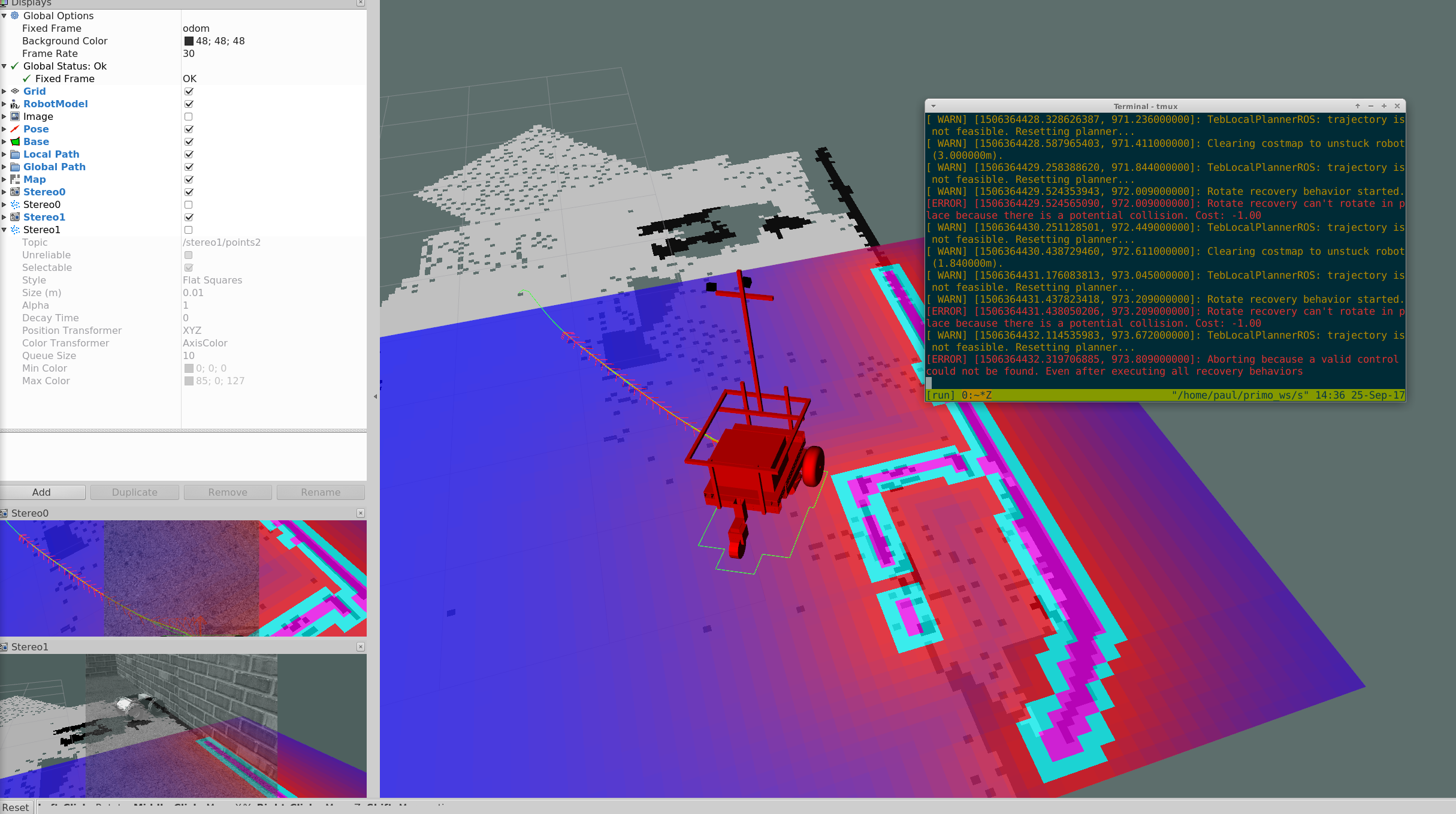
Hello, I have a robot that is having issues getting stuck. In a lot of situations, a simple reverse operation would un stick it. Rotate recovery doesn't work well because my robot's turning center is offset from its body. Before I get to writing one from scratch, is there any reversing type recovery behavior i could get move_base to use?
Thanks!
add a comment

