
Stereo Calibration freezes

Greetings.
I'm trying to use 2 iDS ucam USB cameras for stereo vision, but when I'm trying to use both of them with camera_calibration cameracalibrator.py it shows a little window with "display" captition and freezes:
$ rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.108 right:=/stereo/right/image_raw left:=/stereo/left/image_raw right_camera:=/stereo/right left_camera:=/stereo/left
('Waiting for service', '/stereo/left/set_camera_info', '...')
OK
('Waiting for service', '/stereo/right/set_camera_info', '...')
OK
init done
rostopic shows that I still do have cameras ready to transmit images
$ rostopic list
/image /rosout /rosout_agg
/stereo/left/camera_info
/stereo/left/image_raw
/stereo/left/image_raw/compressed
/stereo/left/image_raw/compressed/parameter_descriptions
/stereo/left/image_raw/compressed/parameter_updates
/stereo/left/image_raw/compressedDepth
/stereo/left/image_raw/compressedDepth/parameter_descriptions
/stereo/left/image_raw/compressedDepth/parameter_updates
/stereo/left/image_raw/theora
/stereo/left/image_raw/theora/parameter_descriptions
/stereo/left/image_raw/theora/parameter_updates
/stereo/left/timeout_count
/stereo/nodelet_manager1/bond
/stereo/nodelet_manager2/bond
/stereo/right/camera_info
/stereo/right/image_raw
/stereo/right/image_raw/compressed
/stereo/right/image_raw/compressed/parameter_descriptions
/stereo/right/image_raw/compressed/parameter_updates
/stereo/right/image_raw/compressedDepth
/stereo/right/image_raw/compressedDepth/parameter_descriptions
/stereo/right/image_raw/compressedDepth/parameter_updates
/stereo/right/image_raw/theora
/stereo/right/image_raw/theora/parameter_descriptions
/stereo/right/image_raw/theora/parameter_updates
/stereo/right/timeout_count
/stereo/ueye_cam_nodelet1/parameter_descriptions
/stereo/ueye_cam_nodelet1/parameter_updates
/stereo/ueye_cam_nodelet2/parameter_descriptions
/stereo/ueye_cam_nodelet2/parameter_updates
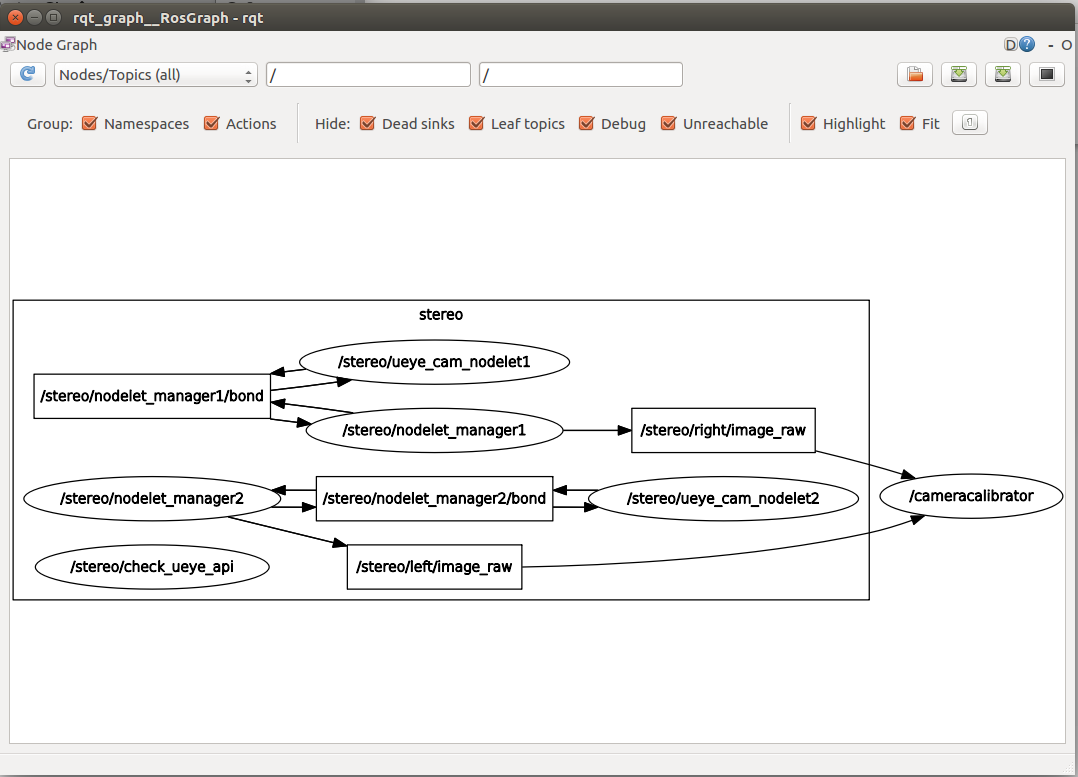
rqt_graph shows that cameras are connected to cameracalibrator
To use ucam cameras I'm using ueye_cam node, installed as described here: http://wiki.ros.org/ueye_cam
To initialize cameras I'm using modified rgb8.launch script from ueye_cam distribution:
<launch>
<group ns="stereo">
<node name="check_ueye_api" pkg="ueye_cam" type="check_ueye_api" required="true" />
<node name="nodelet_manager1" pkg="nodelet" type="nodelet" args="manager" output="screen" />
<node name="nodelet_manager2" pkg="nodelet" type="nodelet" args="manager" output="screen" />
<node pkg="nodelet" type="nodelet" name="ueye_cam_nodelet1"
args="load ueye_cam/ueye_cam_nodelet nodelet_manager1" output="screen">
<param name="camera_name" type="str" value="right" /> <!-- == namespace for topics and services -->
<param name="camera_topic" type="str" value="image_raw" />
<param name="camera_id" type="int" value="0" /> <!-- 0 = any camera; 1+: camera ID -->
<param name="camera_intrinsics_file" type="string" value="" /> <!-- default: ~/.ros/camera_info/<camera_name>.yaml -->
<param name="camera_parameters_file" type="string" value="" /> <!-- default: ~/.ros/camera_conf/<camera_name>.ini -->
<param name="ext_trigger_mode" type="bool" value="False" /> <!-- if False, then camera will operate in free-run mode; otherwise, frames need to be triggered by hardware signal (falling-edge) on digital input pin of camera -->
<!-- the following are optional camera configuration parameters:
they will be loaded on the camera after the .ini configuration
file, and before dynamic_reconfigure. That means that any
(lingering) dynamic parameters from dynamic_reconfigure will
override these values, and that these will override parameters
from the .ini file.
See http://www.ros.org/wiki/ueye_cam for more details. -->
<param name="color_mode" type="str" value="rgb8" /> <!-- valid options: 'rgb8', 'mono8', 'bayer_rggb8' -->
<!-- WARNING: the following 4 parameters specify dimensions for camera's area of interest. Values for image_width and image_height that are smaller than your camera's maximum values will result in cropped field of view. For typical cases, one should modify values for sensor_scaling / binning / subsampling ...