
Difference between depth image types
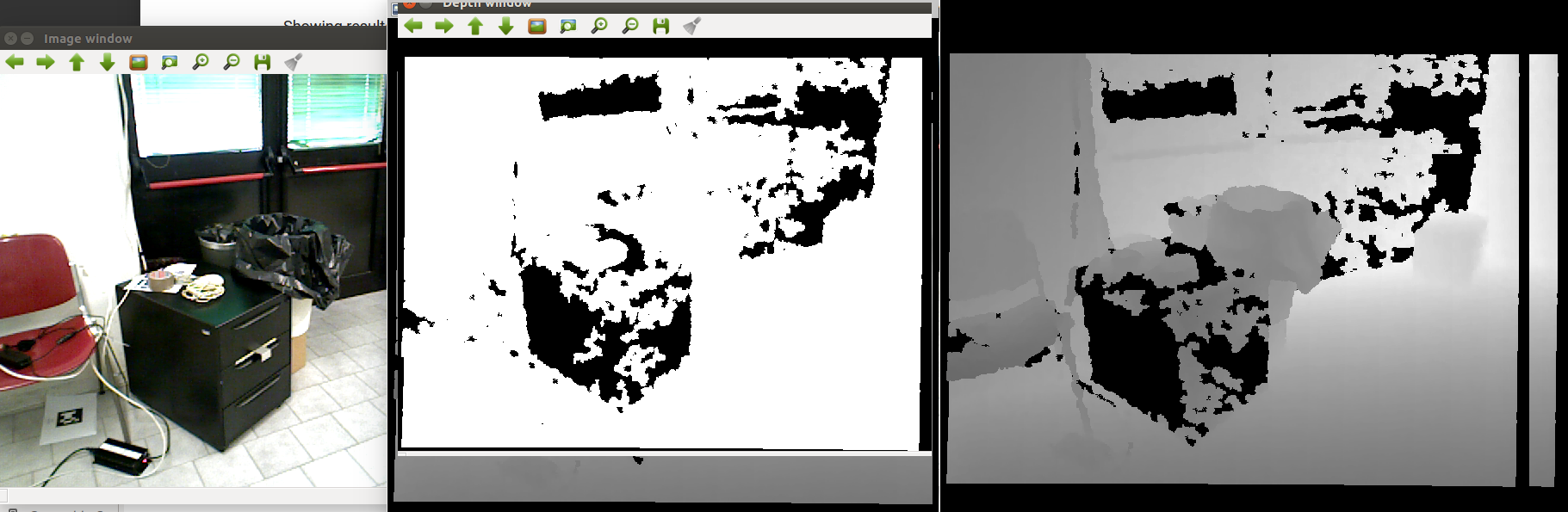
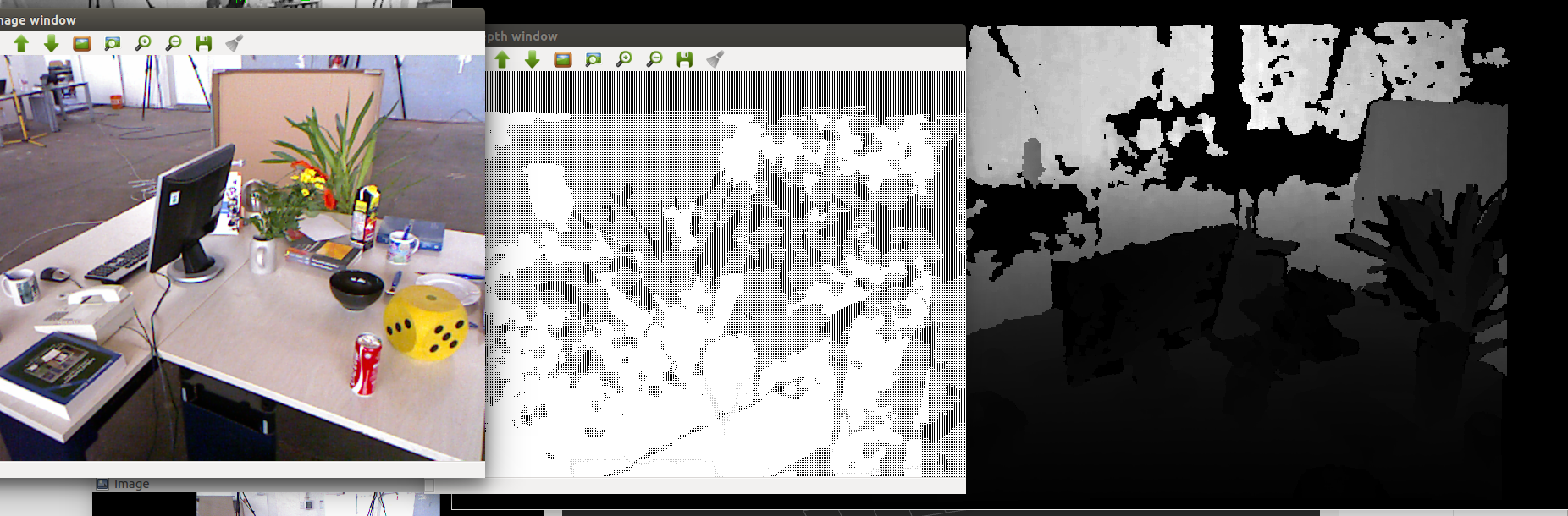
Trying to understand the difference between depth images and how to convert between them. I have two bag files from which I am displaying depth image topics below. The image on the left is the rgb image , the middle image is the generated via cv::imshow and the right image is via rviz.
The top seq displays a point cloud correctly but the bottom does not...and is corrupt. Why are they different and how can I transform them. Can anyone give me some insight on this.
add a comment

