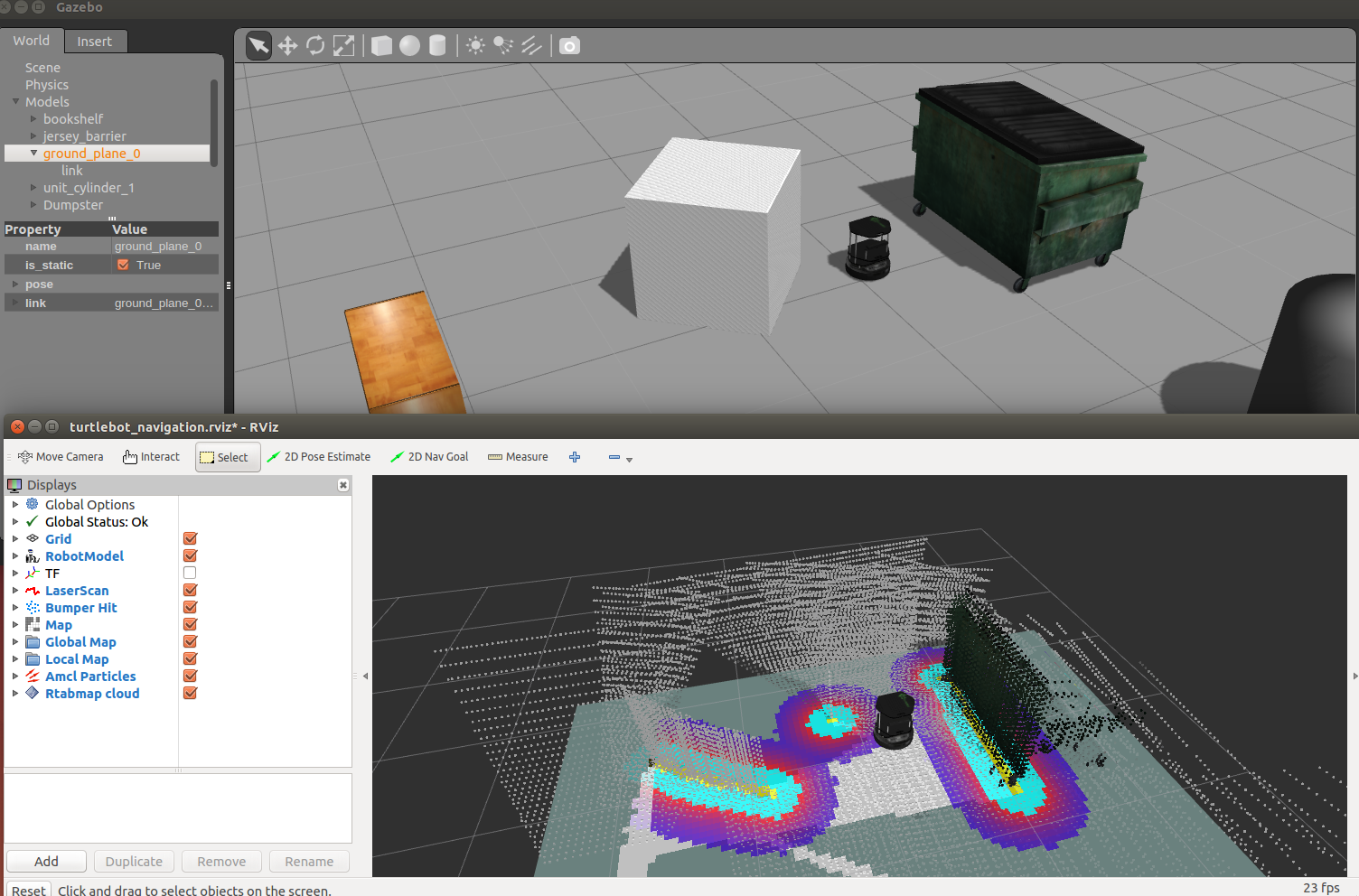
Do you have screenshots? I followed the steps with Indigo binaries (0.11.8, which is the version you are using) and it seems to work:
$ roslaunch turtlebot_gazebo turtlebot_world.launch
$ roslaunch rtabmap_ros demo_turtlebot_mapping.launch simulation:=true
$ roslaunch rtabmap_ros demo_turtlebot_rviz.launch
In the terminal starting demo_turtlebot_mapping.launch:
[ INFO] [1517852555.128380165, 9.630000000]: rtabmap 0.11.8 started...
[ INFO] [1517852555.675103210, 10.180000000]: rtabmap: Rate=1.00s, Limit=0.700s, RTAB-Map=0.0483s, Maps update=0.0001s pub=0.0006s (local map=1, WM=1)
[ INFO] [1517852555.839237051, 10.350000000]: Using plugin "static_layer"
[ INFO] [1517852555.892405578, 10.390000000]: Requesting the map...
[ INFO] [1517852556.793654151, 11.290000000]: rtabmap: Rate=1.00s, Limit=0.700s, RTAB-Map=0.0626s, Maps update=0.0003s pub=0.0007s (local map=1, WM=1)
[ INFO] [1517852556.817614177, 11.320000000]: Resizing costmap to 47 X 33 at 0.050000 m/pix
[ INFO] [1517852556.916866213, 11.420000000]: Received a 47 X 33 map at 0.050000 m/pix
[ INFO] [1517852556.924140451, 11.420000000]: Using plugin "obstacle_layer"
[ INFO] [1517852556.928436404, 11.430000000]: Subscribed to Topics: scan bump
[ INFO] [1517852557.049027487, 11.540000000]: Using plugin "inflation_layer"
[ INFO] [1517852557.208985115, 11.700000000]: Using plugin "obstacle_layer"
[ INFO] [1517852557.254371193, 11.740000000]: Subscribed to Topics: scan bump
[ INFO] [1517852557.351695756, 11.830000000]: Using plugin "inflation_layer"
[ INFO] [1517852557.488057833, 11.970000000]: Created local_planner dwa_local_planner/DWAPlannerROS
[ INFO] [1517852557.498203070, 11.980000000]: Sim period is set to 0.20
[ INFO] [1517852557.800370287, 12.290000000]: rtabmap: Rate=1.00s, Limit=0.700s, RTAB-Map=0.0527s, Maps update=0.0001s pub=0.0006s (local map=1, WM=1)
[ INFO] [1517852558.280924102, 12.770000000]: Recovery behavior will clear layer obstacles
[ INFO] [1517852558.333823092, 12.820000000]: Recovery behavior will clear layer obstacles
[ INFO] [1517852558.407647042, 12.900000000]: odom received!
[ INFO] [1517852558.824825239, 13.310000000]: rtabmap: Rate=1.00s, Limit=0.700s, RTAB-Map=0.0443s, Maps update=0.0001s pub=0.0006s (local map=1, WM=1)
[ INFO] [1517852559.821166239, 14.300000000]: rtabmap: Rate=1.00s, Limit=0.700s, RTAB-Map=0.0461s, Maps update=0.0001s pub=0.0006s (local map=1, WM=1)
...



rtabmap 0.11.8 started... Using plugin "static_layer" Requesting the map...