
Identify the edges and cluster the obstacles from a point cloud data (lidar date converted into point cloud).
Hi,
The Laser scan messages from two 2D lidars are converted into point cloud using [laser_geometry] ( http://www.ros.org/wiki/laser_geometry ) package and merged together. Now the point cloud data consists of many points have just x,y information (since two lidars are in same plane z = 0).
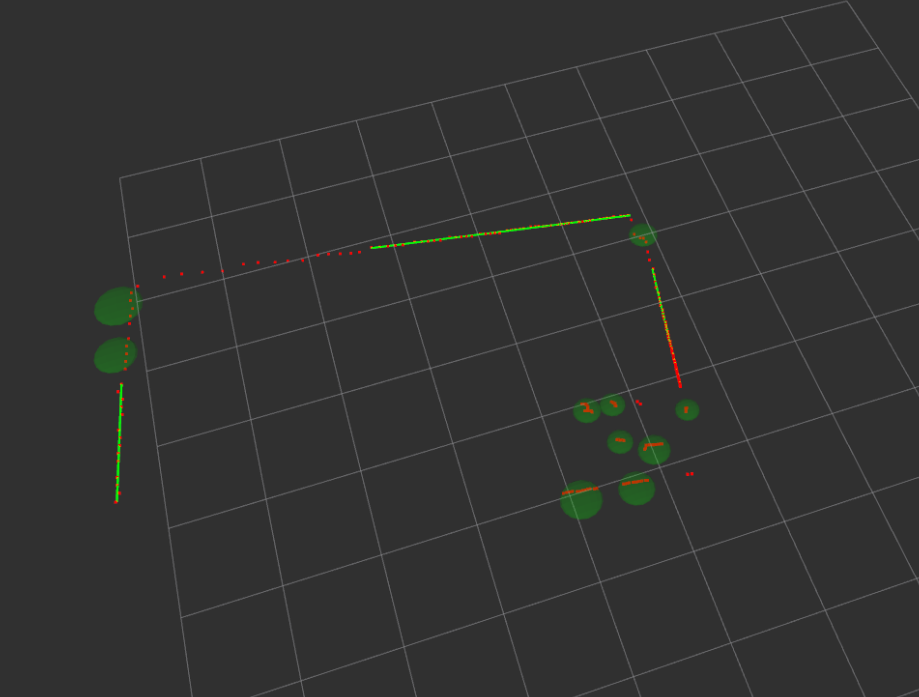
Now I am trying to exact edges and cluster the rest of the points. To give an idea the final output should look some like this
I am not sure how to proceed. Are they any packages out there that can help me to do this ? or does PCL have any thing that can help ?
Thank you.

PCL has some algorithms for clustering points, yes.