
Unknown noise in uwsim 3D range mapping

I am working with UWSim, and I have modelled a rotating multibeam on the AUV (like a lidar on a car) that maps the 3D surroundings of the robot, creating a "range map".
I am facing a type of noise in my range values that I cannot determine (see photo). A part from the seafloor (shown above because I got a mess in the TF tree most probably and I haven't managed to put it below the AUV tf), one can see how sparse voxels are mapped as well.
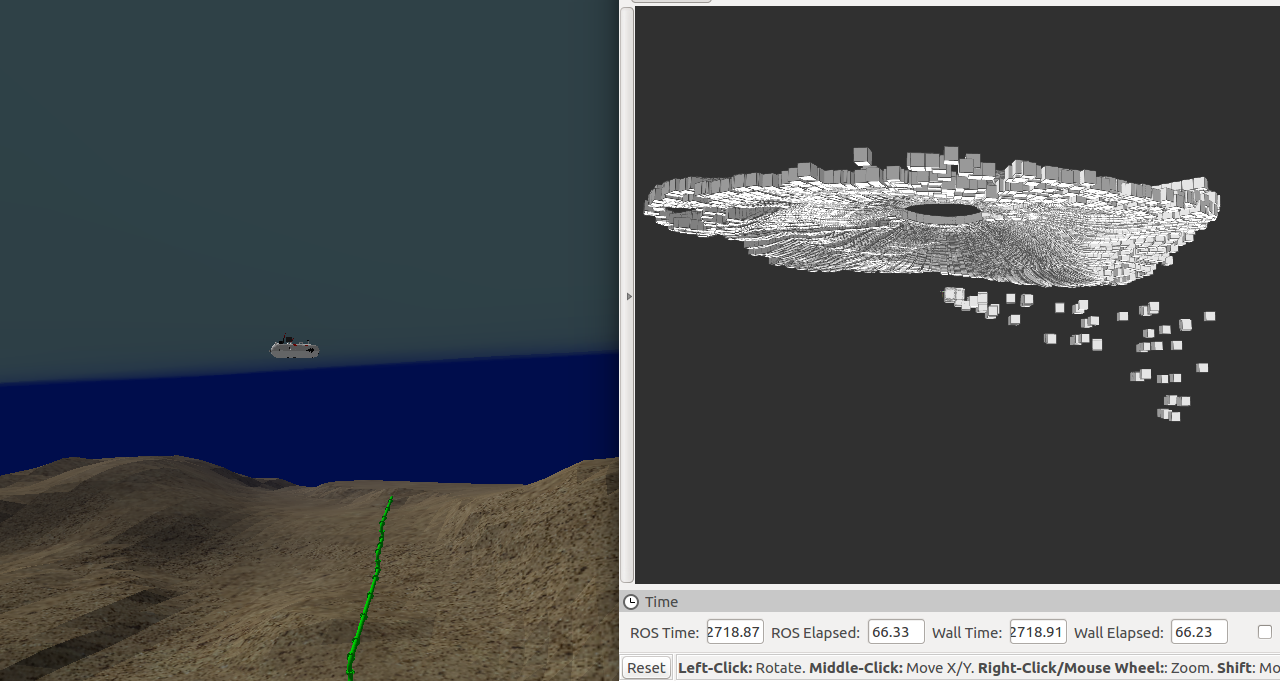
They appear behind the AUV (where there is nothing), and mapped at many different ranges.
Is the sonar assigning a wrong range to the tail of the AUV because of it being too close maybe?
add a comment
