
Help needed with TF issues .

Hey , i am working on a 4 wheel drive differential robot , I am using Rosserial to talk to the arduino (cmd_vel) and arduino publishes back (tf , in which the odom is there).
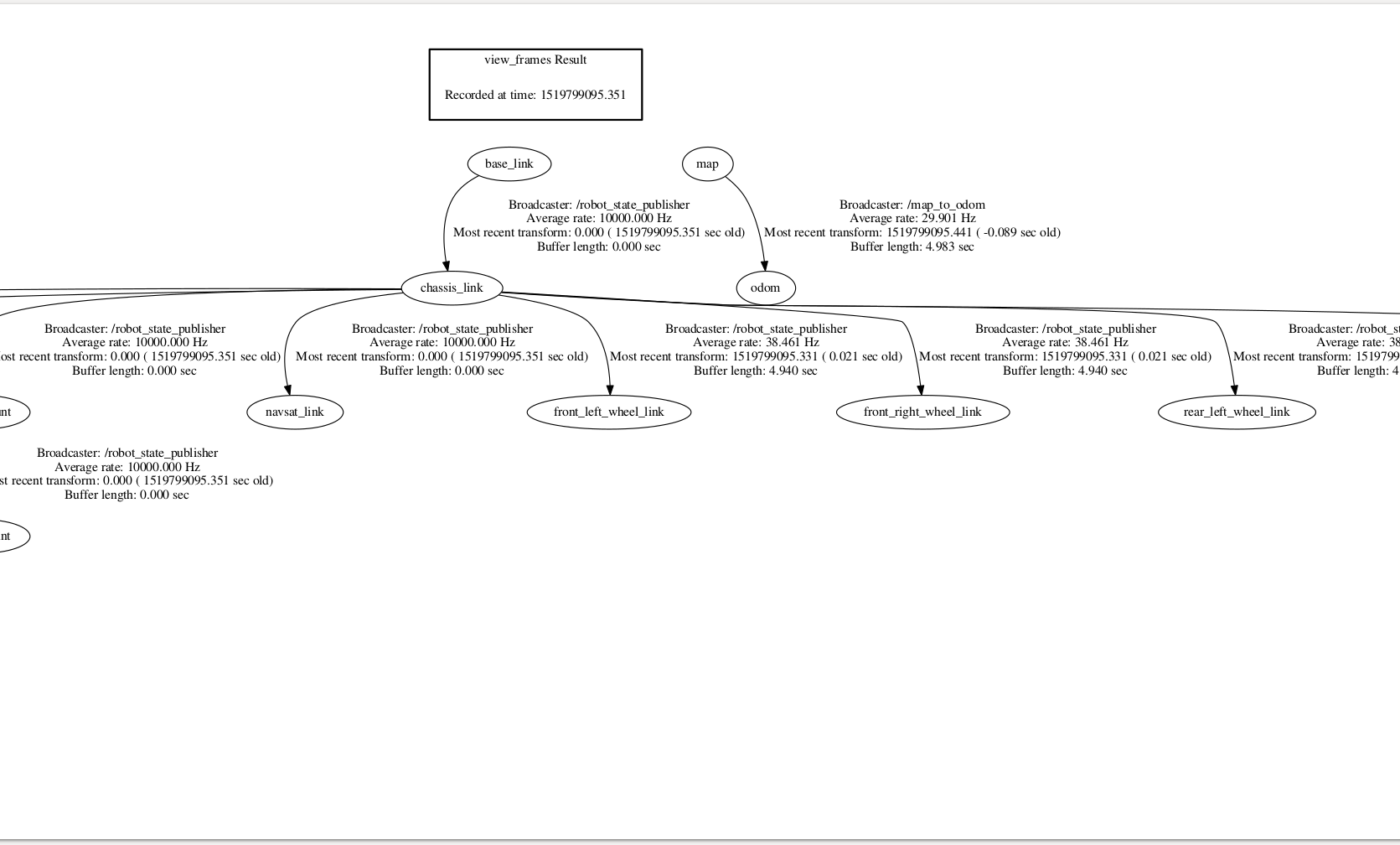
Timed out waiting for transform from base_link to map to become available before running costmap, tf error: Could not find a connection between 'map' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees.. canTransform returned after 0.101146 timeout was 0.1.
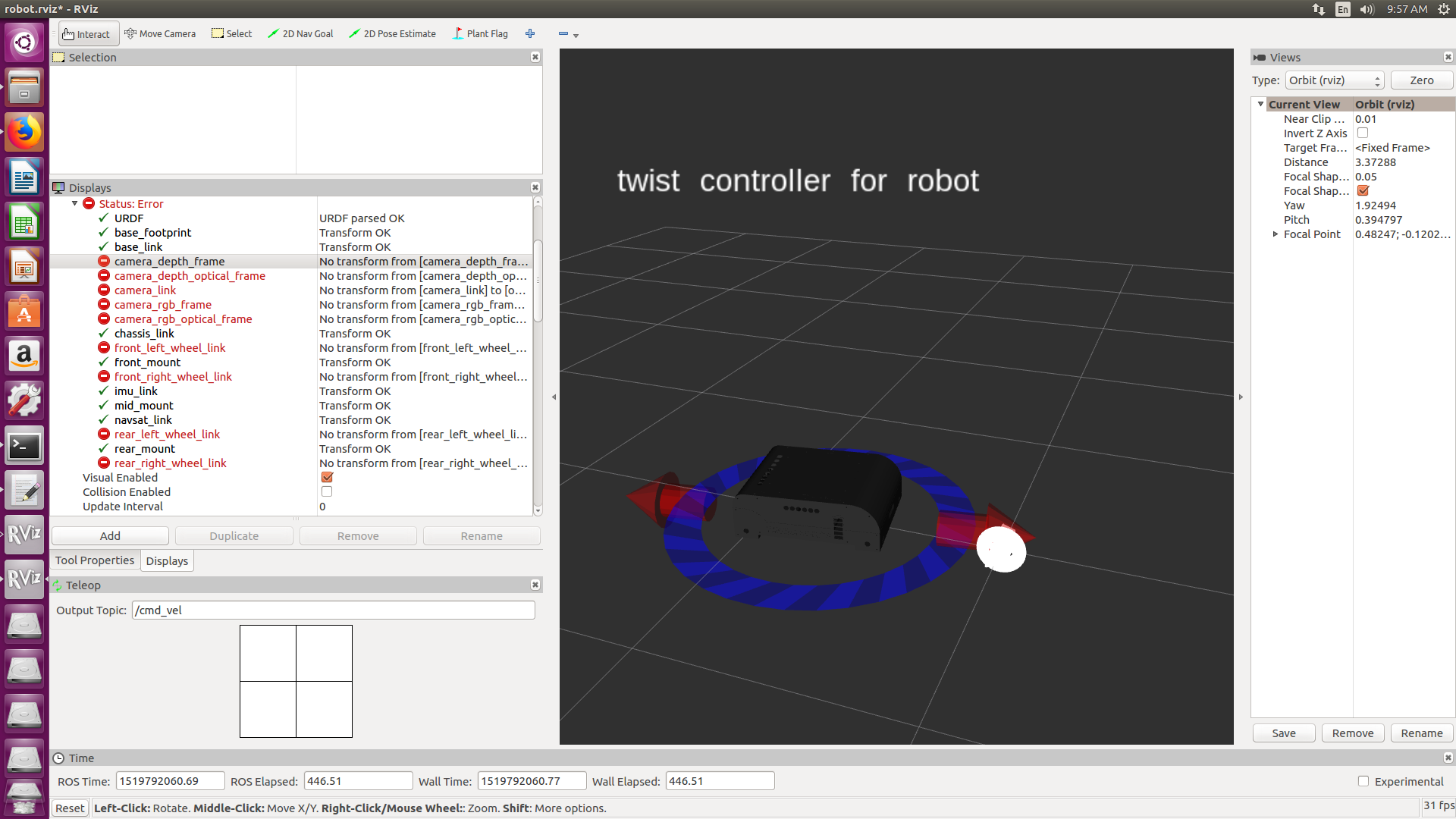
As you can see from the image , the error is No transform from camera to odom . I have done all simulations and it works properly ,but when i am using the Real robot , this error pops up .
What could be the error , the possibilities that i could think of are the below
- The frames not being synced , will i have to subscribe to a /clock topic on the arduino to synchronize the /tf topic .
- /odom as a dedicated topic doesnt exist .
Also can someone explain me the differences between
- /odometry/filtered
- /velocity_controller/odom
- /tf topic
Additional information , the Arduino code which communicates to kangaroo x2.
enter code here
#include <ros.h>
#include <std_msgs/Empty.h>
#include <ros/time.h>
#include <tf/tf.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
#include <geometry_msgs/Twist.h>
#include <std_msgs/String.h>
#include <std_msgs/Empty.h>
#include <std_msgs/Bool.h>
#include <SoftwareSerial.h>
#include <Kangaroo.h>
#define TX_PIN 13 //s1
#define RX_PIN 12 //s2
// Arduino TX (pin 2) goes to Kangaroo S1
// Arduino RX (pin 3) goes to Kangaroo S2
// Independent mode channels on Kangaroo are, by default, '1' and '2'.
SoftwareSerial SerialPort(RX_PIN, TX_PIN);
KangarooSerial K(SerialPort);
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//SETTINGS//////////////////////////////////////////////
#define Mixed_mode true
bool position_control = true;
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
#ifdef Mixed_mode
KangarooChannel Drive(K, 'D');
KangarooChannel Turn(K, 'T');
#endif
#ifndef Mixed_mode
KangarooChannel KL(K, '1');
KangarooChannel KR(K, '2');
#endif
ros::NodeHandle nh;
long WHEEL_DIST = 2 ;
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
std_msgs::Bool position_control_msg;
std_msgs::Bool mixed_mode_msg;
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
double x = 1.0;
double y = 0.0;
double theta = 1.57;
void cmd_velCallback( const geometry_msgs::Twist& CVel){
//geometry_msgs::Twist twist = twist_msg;
long vel_x = CVel.linear.x*200;
long vel_th = -CVel.angular.z*200;
x += cos(theta)*CVel.linear.x*0.1;
y += sin(theta)*CVel.linear.x*0.1;
theta += CVel.angular.z*0.1;
long speed_right = (vel_th*WHEEL_DIST)/2 + vel_x;
long speed_left = (vel_x*2) - speed_right;
long right_vel = 0.0;
long left_vel = 0.0;
//right_vel = vel_th * WheelSeparation / 2.0;
//left_vel = (-1) * right_vel;
//left_vel = vel_x - vel_th * WheelSeparation / 2.0;
//right_vel = vel_x + vel_th * WheelSeparation / 2.0;
// turning
//IF MIXED MODE CONFIG
#ifdef Mixed_mode
if(int(vel_x) == 0 && int(vel_th)==0){
if (position_control){
Turn.pi(0);
Drive.pi(0);}
else{
Turn.s(0);
Drive.s(0);
}
}
// forward / backward
else if(abs(vel_x) > abs(vel_th) ){
if (position_control){
Drive.pi(vel_x);
Turn.pi(vel_th);
}
else{
Drive.s(vel_x);
Turn.s(vel_th);
}
}
// moving doing arcs
else{
if (position_control){
Drive.pi(vel_x);
Turn.pi(vel_th);}
else{
Turn.s(vel_th);
Drive.s(vel_x);
}
}
#endif
//////////////////////////////////////////////////////////////////////////////////////////////////////
//IF NOT MIXED MODE CONFIG
#ifndef Mixed_mode
if(position_control){
KL.pi(speed_left);
KR.pi ...
As you can see on your tf tree map and odom are linked together but not with the other tf which is the issue. Do you launch joint_state_publisher and robot_state_publisher ?
Thanks , just checked , i had missed to include joint_state_publisher .
Now the tf issues between base_link and odom is solved .
But when i am launching the freenect node for using the kinect , its still saying
"
No transform from [camera_depth_frame] to [odom]"First, is your camera_depth_frame in your tf tree ? Also check in rviz on the display pannel -> Grid -> Reference Frame, is it <fixed frame=""> or have you redefined it (which you should do) ?
Yes camera_depth_frame is there in the tf tree. On Rviz i have tried setting the reference frame as /odom , /base_link , /camera_link .
Still doesnt work .
Infact the Tf tree changes when i launch the freenect node/
https://answers.ros.org/question/2839...
This might be due to the topics you're publishing/subscribing in your code that are not the same as the freenect's ones, have you checked that ? That could be solved with some remapping.