
how to load nextage urdf in rviz
I have been experimenting with URDF files and would like to load the Nextage urdf file.
roslaunch urdf_tutorial display.launch model:=`rospack find nextage_description\`/urdf/NextageOpen.urdf gui:=True
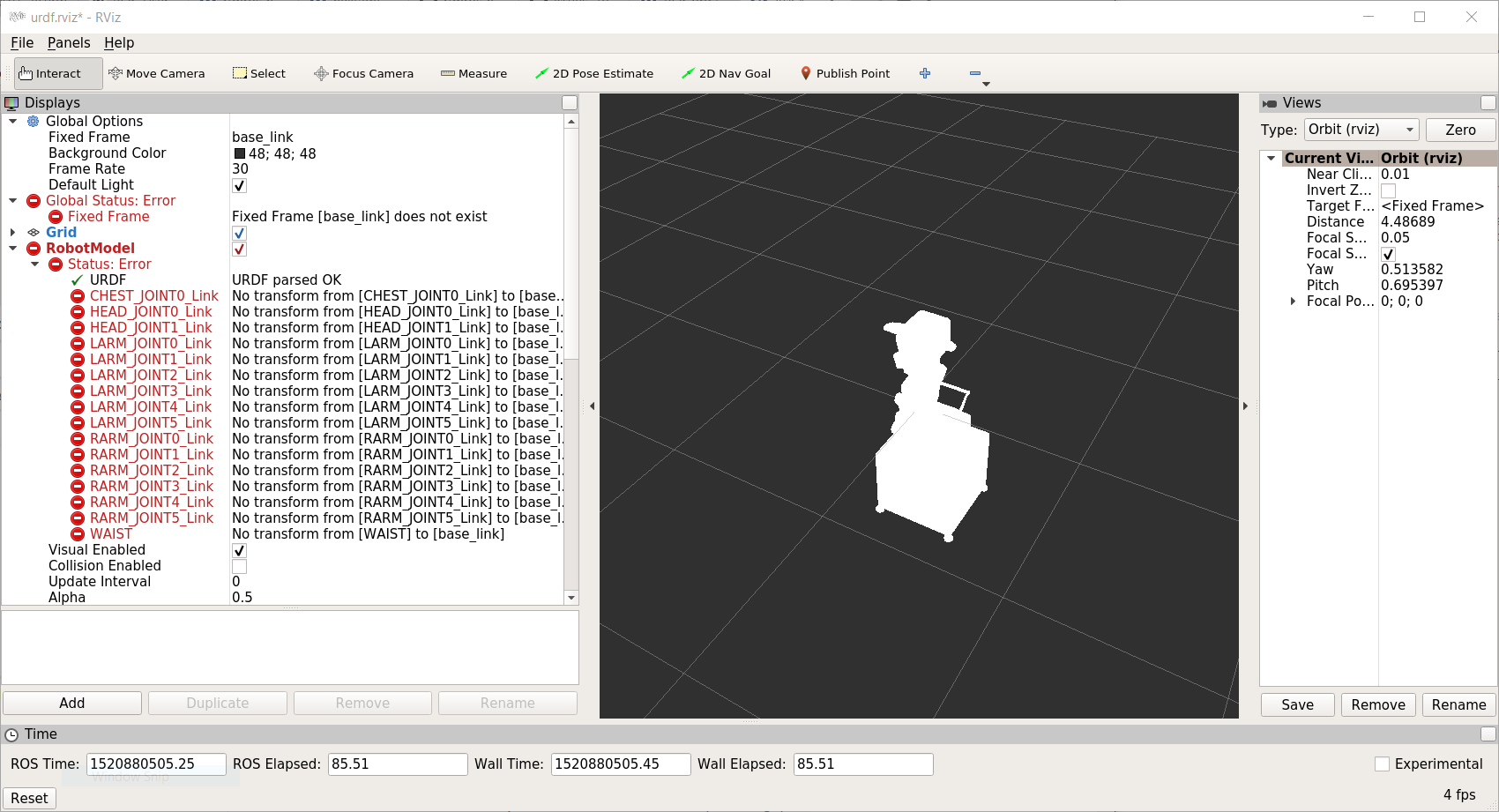
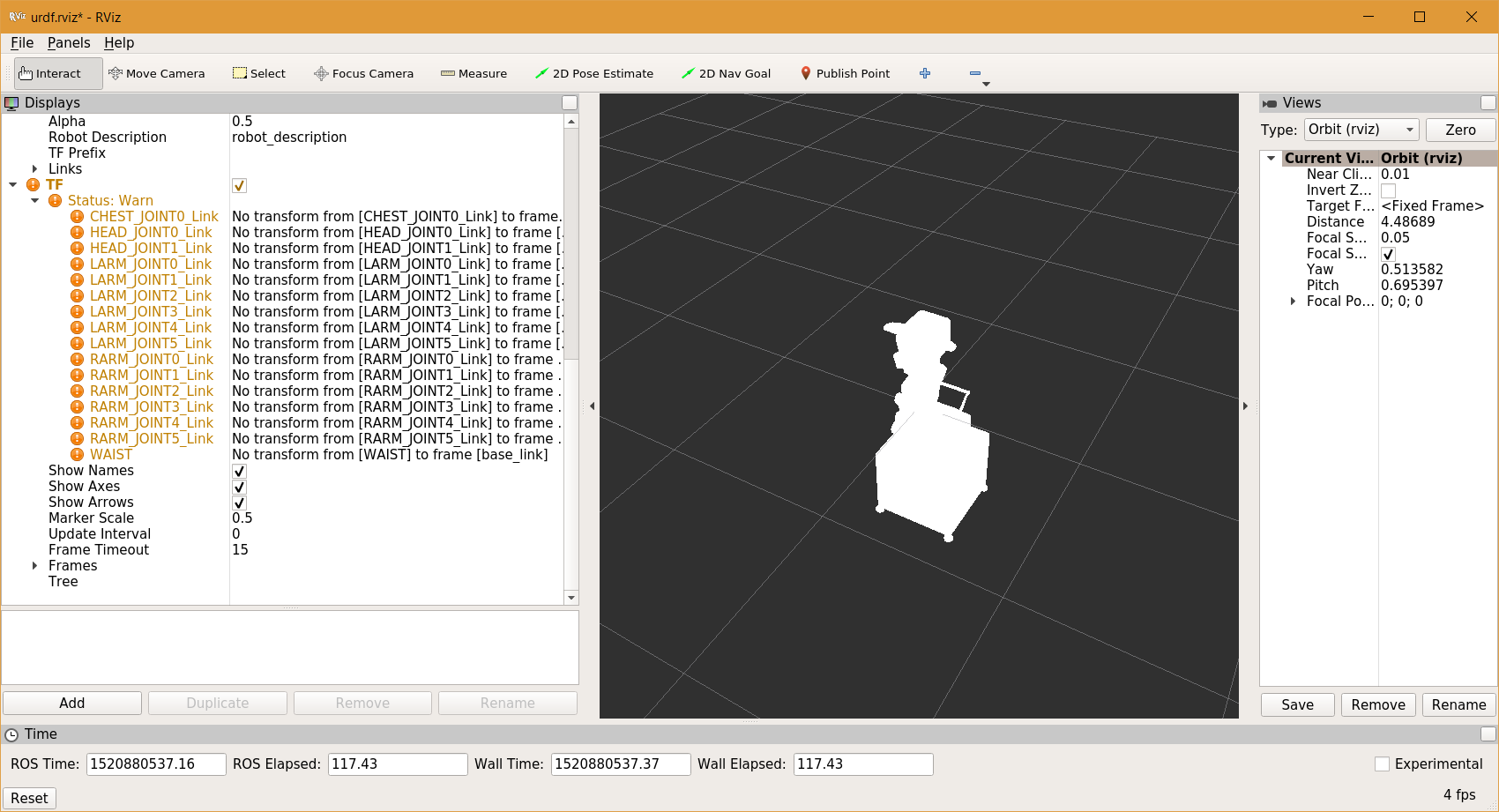
will launch rviz and I can see a white shape but as the panel on the left shows, there are many errors (see images above). Checking out the latest https://github.com/tork-a/rtmros_next... and visualizing this did not help either; same problem.
Any ideas how to fix this? Thanks!
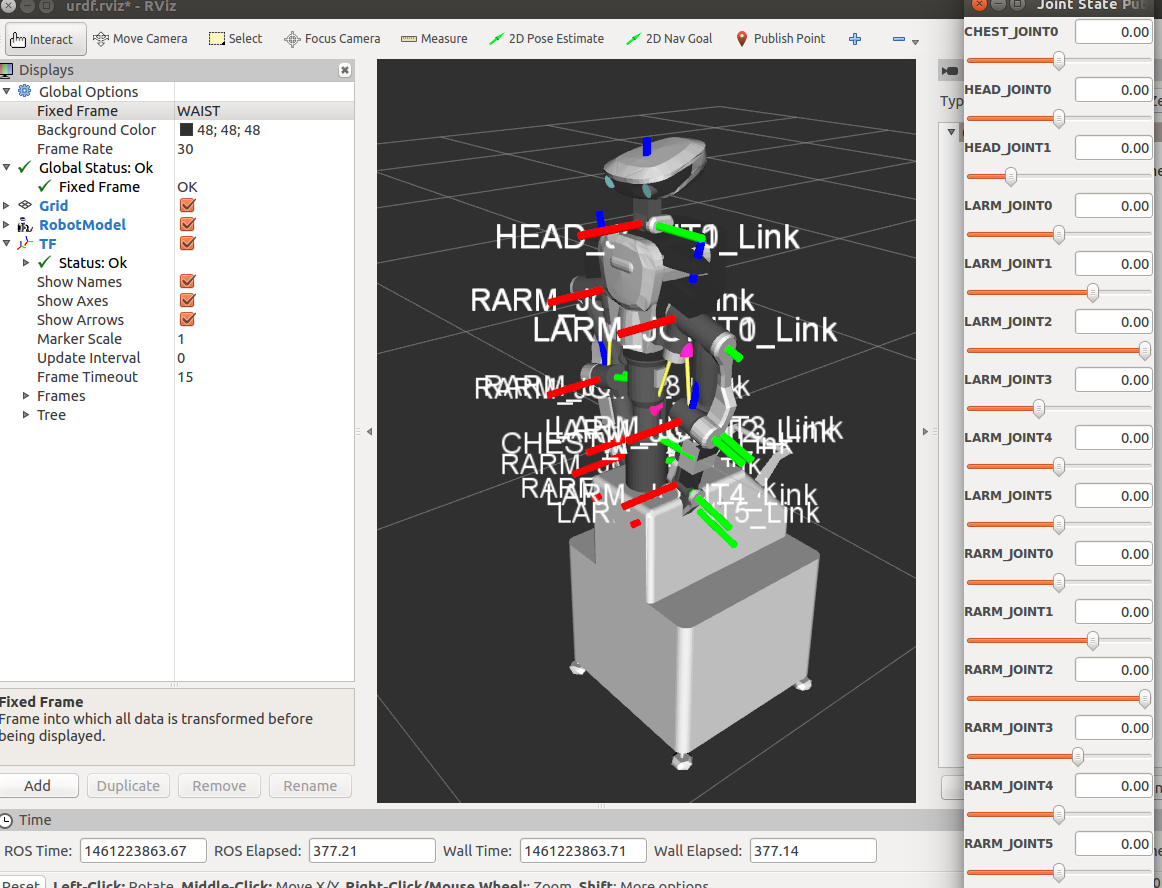

Did you try setting a new fixed frame? Rviz is telling you that the one that you have selected does not exist.