
Cannot get odom->base_link from laser_scan_matcher
Hi,
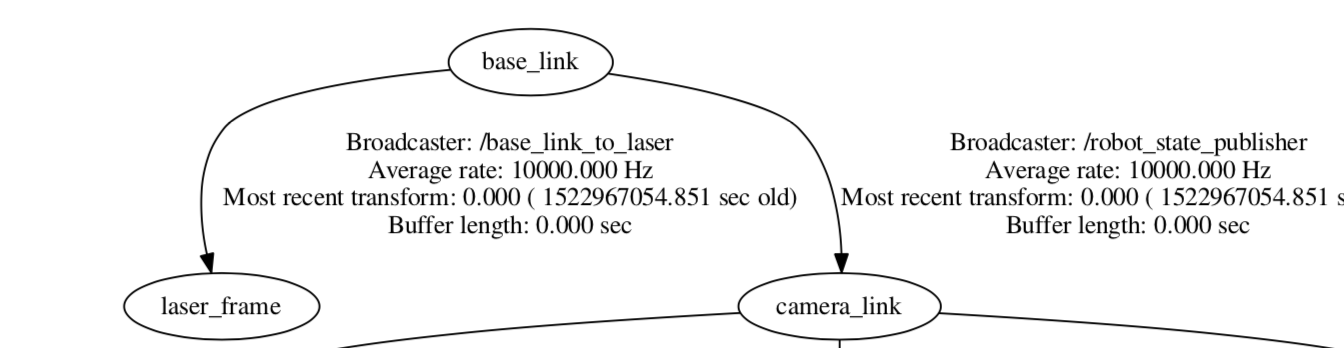
I have a scanse spinning lidar that I'm trying to use to generate a map using gmapping. Right now I have a base_link->laser_frame tf that I am publishing using tf2_ros. Since gmapping requires a odom->base_link tf, I am now trying to use laser_scan_matcher to generate that transform.
However, I'm stuck with trying to generate the odom->base_link. Here is the launch file I'm using to run laser_scan_matcher:
<?xml version="1.0"?>
<launch>
<node pkg="mavros" type="mavros_node" name="mavros" clear_params="true">
<param name="fcu_url" value="tcp://127.0.0.1:5760" />
<param name="system_id" value="1" />
</node>
<node
pkg="laser_scan_matcher"
type="laser_scan_matcher_node"
name="laser_scan_matcher_node"
output="screen"
>
<param name="base_frame" value="base_link" />
<param name="fixed_frame" value="odom" />
<param name="use_imu" value="true" />
<param name="use_odom" value="false" />
<param name="use_vel" value="false" />
<param name="max_iterations" value="10" />
<param name="publish_tf" value="true" />
<param name="publish_pose" value="true" />
<remap from="imu/data" to="/mavros/imu/data" />
<remap from="scan" to="/camera/scan" />
</node>
</launch>
And here is my launch file for running my scanse lidar:
<launch>
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find realsense_ros_camera)/urdf/test_r200_camera.urdf.xacro'" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_2_camera_link" args="0 0 0 0 0 0 base_link camera_link"/>
<node pkg="tf2_ros" type="static_transform_publisher" name="base_link_to_laser" args="0.13 0 0 0 0 0 base_link laser"/>
<!-- run sweep_node node -->
<node
name="sweep_node"
pkg="sweep_ros"
type="sweep_node"
output="screen">
<param name="serial_port" type="string" value="/dev/ttyUSB0"/>
<param name="serial_baudrate" type="int" value="115200"/>
<param name="frame_id" type="string" value="laser"/>
<param name="rotation_speed" value="5" />
</node>
<!-- run pointcloud_to_laserscan node -->
<node pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" name="pointcloud_to_laserscan">
<remap from="cloud_in" to="pc2"/>
<remap from="scan" to="/camera/scan"/>
<rosparam>
target_frame: "laser"
transform_tolerance: 0.001
min_height: -0.5
max_height: 0.5
angle_min: -2.14
angle_max: 2.14
angle_increment: 0.005
scan_time: 0.1
range_min: 0.1
range_max: 40.0
use_inf: true
concurrency_level: 1
<rosparam />
</node>
</launch>
Additionally, I'm getting the following warning over and over when running laser_scan_matcher:
:err: Valid: 31/857 invalid: 826.
[ WARN] [1523266642.454564818]: Error in scan matching
I am using Ubuntu 16.04 with ROS Kinetic with the scanse sweep-ros wrapper.
Also, here is an output of /camera/scan:
header:
seq: 1262
stamp:
secs: 1523266739
nsecs: 995312062
frame_id: "laser"
angle_min: -2.1400001049
angle_max: 2.1400001049
angle_increment: 0.00499999988824
time_increment: 0.0
scan_time: 0.10000000149
range_min: 0.10000000149
range_max: 40.0
ranges: [1.5499999523162842, inf, inf, inf, inf, inf, inf, inf, inf, 1.5499999523162842, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, 1.5700000524520874, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, 1.4800000190734863, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf, inf ...
please don't post screenshots of text, as this is not searchable. Just copy the text Output of the console, and paste it (by editing your question) and Format using the preformatted text button (101010) as code.
please also provide more info about the laserscanner you use. Best also edit your question and include the configuration of the laser scanner, the Launch file with which you start it and maybe the Output of a
rostopic echo /camera/scan(if this is the topic).Hi @mig, apologies for that. I've edited my post to reflect your comment. Thanks!
The scan topic doesn't look good. There are IMO way to many
infreadings. Is this something that makes sense for your Environment? If not, you should tweak thepointcloud_to_laserscanparameters. Yours differ from the ones in thesweep-rosrepo quite a lot.If the Output is ok, scan matching will definitely be hard with only that Little valid measurements...
We changed the parameters for
sweep-rosbecause we've observed that it works better for our particular use case. However, I've also tested the laser_scan_matcher with the same parameters as the example and the "Error in scan matching" warning remains.So unless we can minimize the amount of
infreadings/remove them completely, we're always going to get that warning? And would you say that the "Error in scan matching" is the cause as to why we are not able to get theodom->base_linktransform?I guess so. The scan_matcher provides
odom->base_linkon the basis of the matched scans. If it cannot do that, I guess it will not publish an incorrect transform (but I could be wrong). It could also be a problem of frequency. I don't know how many updates are required for the scan matching to ...