
Continuously Tracking and storing 6D pose of an object in Gazebo simulation. [closed]
Hi,
Update: I have already asked this question on the Gazebo forum (here ) but have not received a reply. Hence This question is being asked in the expectation that someone using ROS + gazebo may have done something similar and can help out.
I am currently working on a drone related project and using gazebo for simulation
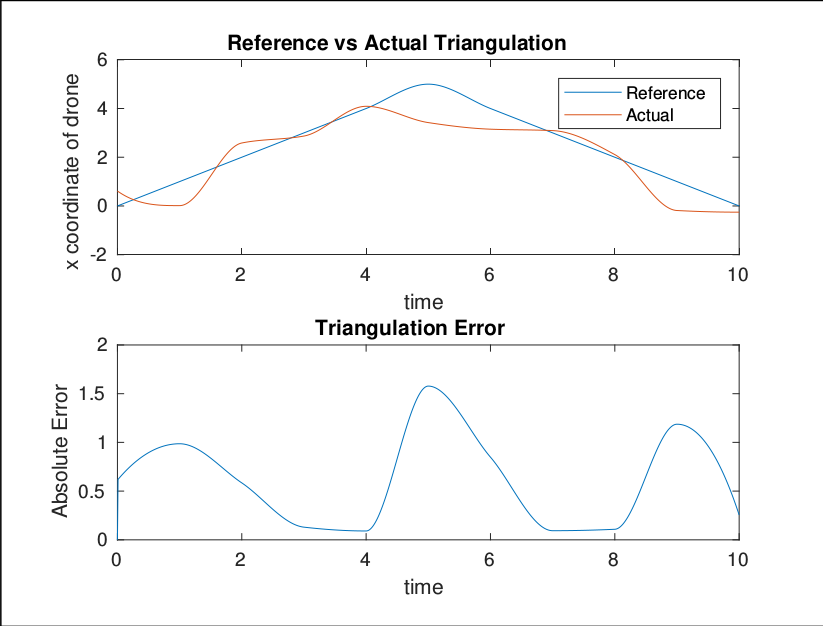
In order to measure accuracy of my localisation, I need to know the ground truth values. Is there some way in Gazebo to continuously track/store the actual/true/ground truth 6D pose, ie the rotation and translation w.r.t. to a fixed frame like the world frame.
I wish to create something like the following -
Thanks!

If you're asking about a Gazebo-only solution, you should post this question over at
answers.gazebosim.org. If you're actually asking about how to receive such data in ROS, then this becomes a Gazebo plugins question, which we could keep open on this site.Well I did ask on gazebo forum, but have not yet received a reply. Hence I considered asking here since people may have done projects using ROS + gazebo for such a thing.
If/when you're cross-posting, always include a link to the other post. That way we can avoid split discussions.
Hi,
I have updated the question, could you kindly reopen it ?
Your post at Gazebo Answers is 12 hours old. Both of these communities are run by volunteers, and it is Sunday: people probably have something better to do.
Summarising: please wait a little longer before cross-posting to other fora.