
Images from fisheye camera are displayed correctly with BGR8 encoding but not with MONO8
Hi,
I want to output grayscale images from a fisheye camera (FOV < 180 degree). I understand that ROS currently doesn't support fisheye distortion models. However, I see that if I use a BGR8 image encoding (by setting sensor_msgs::image_encodings::BGR8), I can still get a "normal" distorted image, like this:
 .
.
But if I change to MONO8 encodings, the image is unusable:
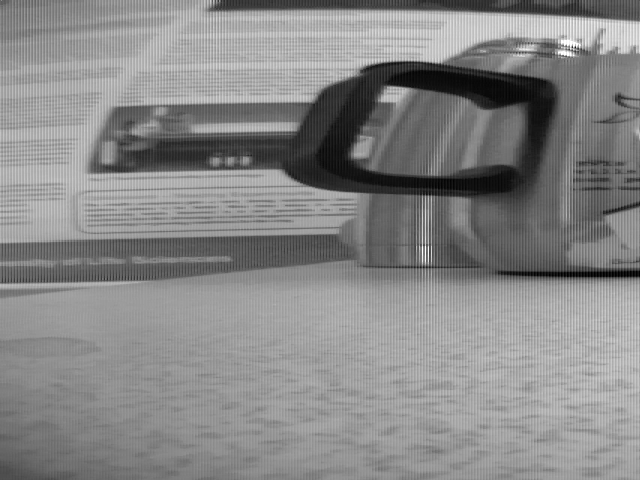
These 2 images were captured with my camera firmly attached to the table. So I don't understand why I can get a "normal" color image but not a grayscale one?
add a comment

