
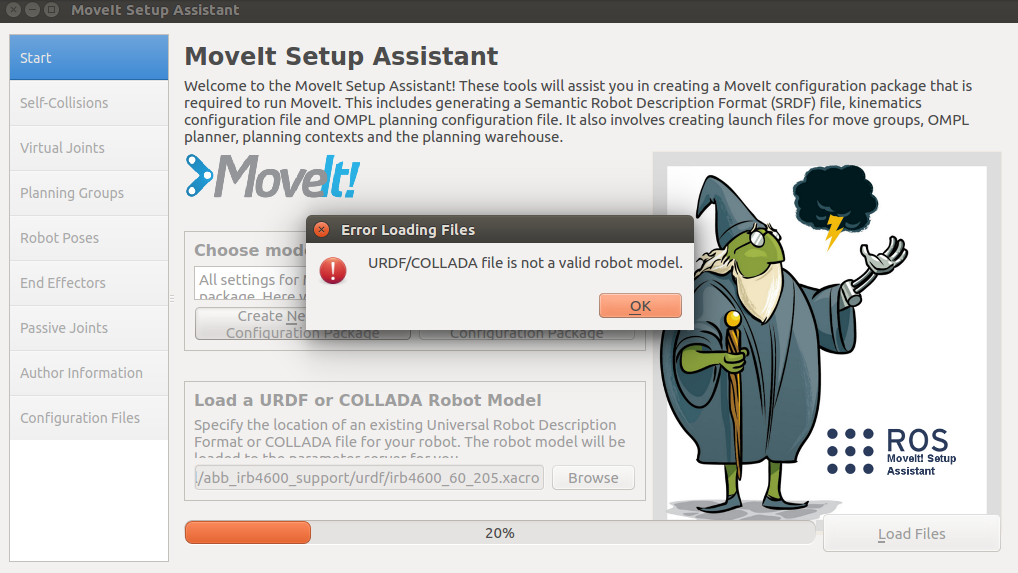
"URDF/COLLADA file is not a valid robot model" when loading IRB4600 in MoveIt Setup Assistant
I found that all the support pkg under abb kinetic-devel could be open in MoveIt Setup Assistant while all the support pkg under abb_experimental kinetic-devel cannot be open with the notice
"URDF/COLLADA file is not a valid robot model"
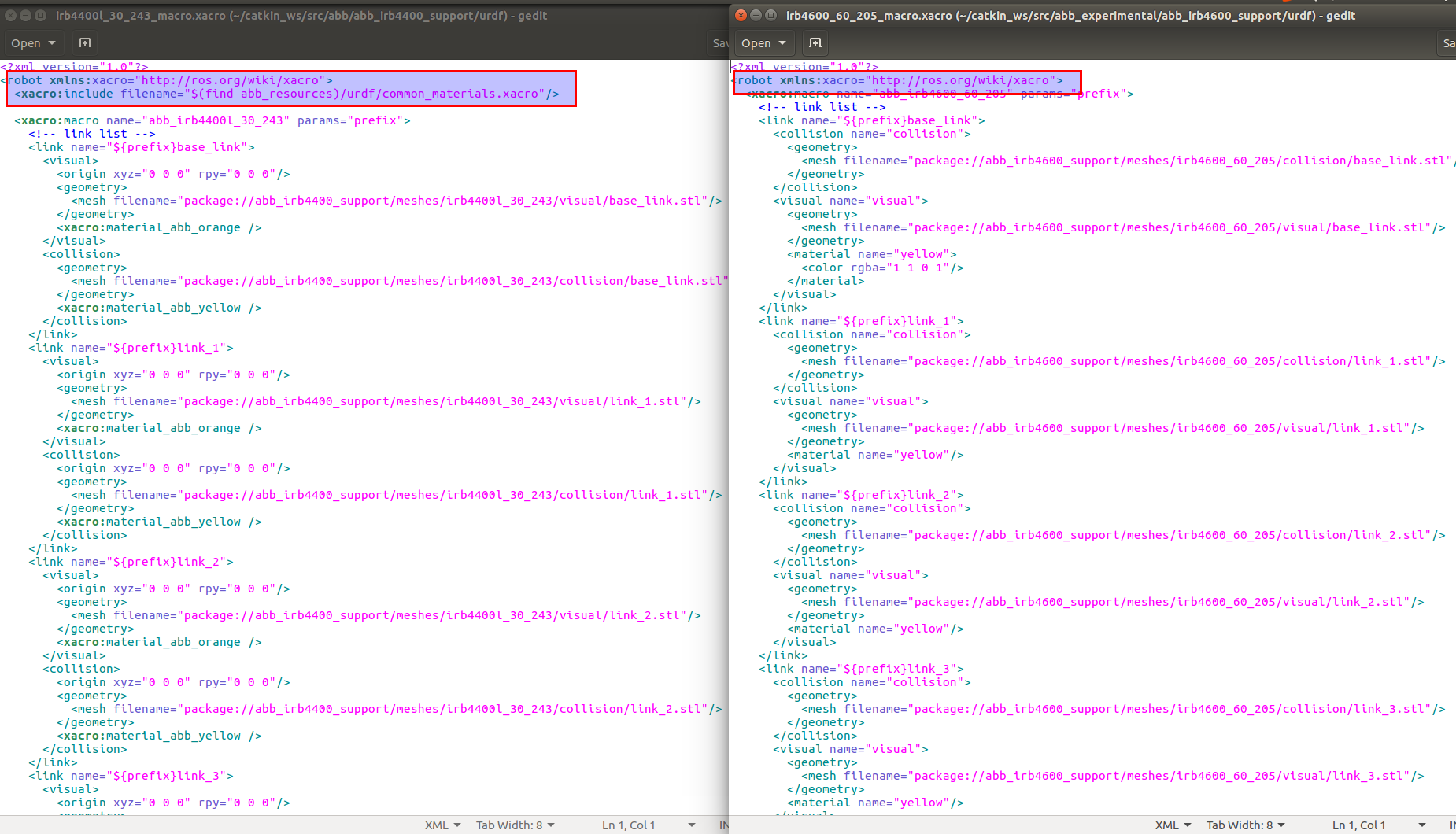
and I checked the difference between the two big pkgs and then found that the abb kinetic-devel pkg includes abb_driver and abb_source while abb_experimental kinetic-devel doesn't have.
So I copy the 4600 pkg into the abb kinetic-devel pkg in order to share the abb_driver and abb_source (4400L_30_43.xacro has used the material config in abb_source), but it still cannot be open by MoveIt Setup Assistant.
BTW, I need the irb4600_60_205_moveit_config file to control the manipulator in robotstudio by plan and execute in Rviz. Shall I config the abb_experimental kinetic-devel after downloading it?
Edit: Here are my handle details
andy@andy-zhaoyang-k42-80:~/catkin_ws$ rosdep install --from-paths src --ignore-src --rosdistro kinetic
#All required rosdeps installed successfully
andy@andy-zhaoyang-k42-80:~/catkin_ws$ catkin_make
Base path: /home/andy/catkin_ws
Source space: /home/andy/catkin_ws/src
Build space: /home/andy/catkin_ws/build
Devel space: /home/andy/catkin_ws/devel
Install space: /home/andy/catkin_ws/install
####
#### Running command: "make cmake_check_build_system" in "/home/andy/catkin_ws/build"
####
####
#### Running command: "make -j4 -l4" in "/home/andy/catkin_ws/build"
####
[ 0%] Built target trajectory_msgs_generate_messages_nodejs
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_DeviceInfo
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_StartMotion
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_SetRemoteLoggerLevel
[ 0%] Built target std_msgs_generate_messages_nodejs
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_RobotMode
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_DebugLevel
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_CmdJointTrajectory
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_GetRobotInfo
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_StopMotion
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_TriState
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_RobotStatus
[ 0%] Built target trajectory_msgs_generate_messages_py
[ 0%] Built target std_msgs_generate_messages_py
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_SetDrivePower
[ 0%] Built target trajectory_msgs_generate_messages_cpp
[ 0%] Built target std_msgs_generate_messages_cpp
[ 0%] Built target _industrial_msgs_generate_messages_check_deps_ServiceReturnCode
[ 0%] Built target trajectory_msgs_generate_messages_eus
[ 0%] Built target std_msgs_generate_messages_eus
[ 0%] Built target trajectory_msgs_generate_messages_lisp
[ 0%] Built target std_msgs_generate_messages_lisp
[ 0%] Built target geometry_msgs_generate_messages_lisp
[ 0%] Built target geometry_msgs_generate_messages_cpp
[ 0%] Built target geometry_msgs_generate_messages_nodejs
[ 0%] Built target geometry_msgs_generate_messages_py
[ 0%] Built target geometry_msgs_generate_messages_eus
[ 1%] Built target simple_message_dummy
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_matrix33
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_CamSelect
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_gyros_offsets
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_demo
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_phys_measures
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_magneto
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_vector31
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_euler_angles
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_rc_references
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_vision_perf
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_RecordEnable
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_wifi
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_pressure_raw
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_vision_of
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_raw_measures
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_games
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_hdvideo_stream
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_watchdog
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_video_stream
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_time
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_vision_raw
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_FlightAnim
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_zimmu_3000
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_trackers_send
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_references
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_altitude
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_wind_speed
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_pwm
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_Navdata
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_LedAnim
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_vision
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_vision_detect
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_adc_data_frame
[ 1%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_kalman_pressure
[ 2%] Performing update step for 'ardronelib'
[ 2%] Built target _ardrone_autonomy_generate_messages_check_deps_vector21
[ 2%] Built target industrial_utils
[ 2%] Built target _ardrone_autonomy_generate_messages_check_deps_navdata_trims
[ 2%] Built target industrial_robot_client_dummy
[ 2%] Performing configure step for 'ardronelib'
No configure
[ 2%] Performing build step for 'ardronelib'
[ 5%] Built target industrial_msgs_generate_messages_nodejs
make[3]: warning: jobserver unavailable: using ...
Please do not post answers, unless you are answering your own question. This is not a forum, but a Q&A site.
In the future, edit your original question, using the
editbutton/link.Thanks.
Note: your images are not visible. Please reattach them.
But please do not post images of terminals: copy-paste the text from the terminal into your question.