
TF - Transform world frame update rate should be fastest
Hey there,
I am basically doing a transformation from camera_link to world frame
Here is the message before the transformation in [camera_link] frame:
header:
seq: 0
stamp: 4.723000000
frame_id: camera_link
uid: 0
position:
x: 1.10738
y: -0.16057
z: 0.241941
velocity:
x: -0.00120042
y: 0.0169336
z: 0.240961
diameter: 0.064
diameter_px: 26.401
covariance[]
covariance[0]: 0.000693303
covariance[1]: 0.000586575
covariance[2]: 0.00238198
covariance[3]: 0
covariance[4]: 0
covariance[5]: -0
confidence: 1
And this is the message after it was transformed: [in world]
header:
seq: 0
stamp: 4.723000000
frame_id: world
uid: 0
position:
x: 0.322941
y: -0.21167
z: 1.0397
velocity:
x: 0.321961
y: -0.0341664
z: 2.14828
diameter: 0.064
diameter_px: 26.401
covariance[]
covariance[0]: 0.000693303
covariance[1]: 0.000586575
covariance[2]: 0.00238198
covariance[3]: -4.13646e-13
covariance[4]: 1.5708
covariance[5]: 0
confidence: 1
Now actually the high velocities in the world frame could not be correct ....
I have only doubts on how this errors occur:
1) It is because of the different update rate: rosrun tf view_frames
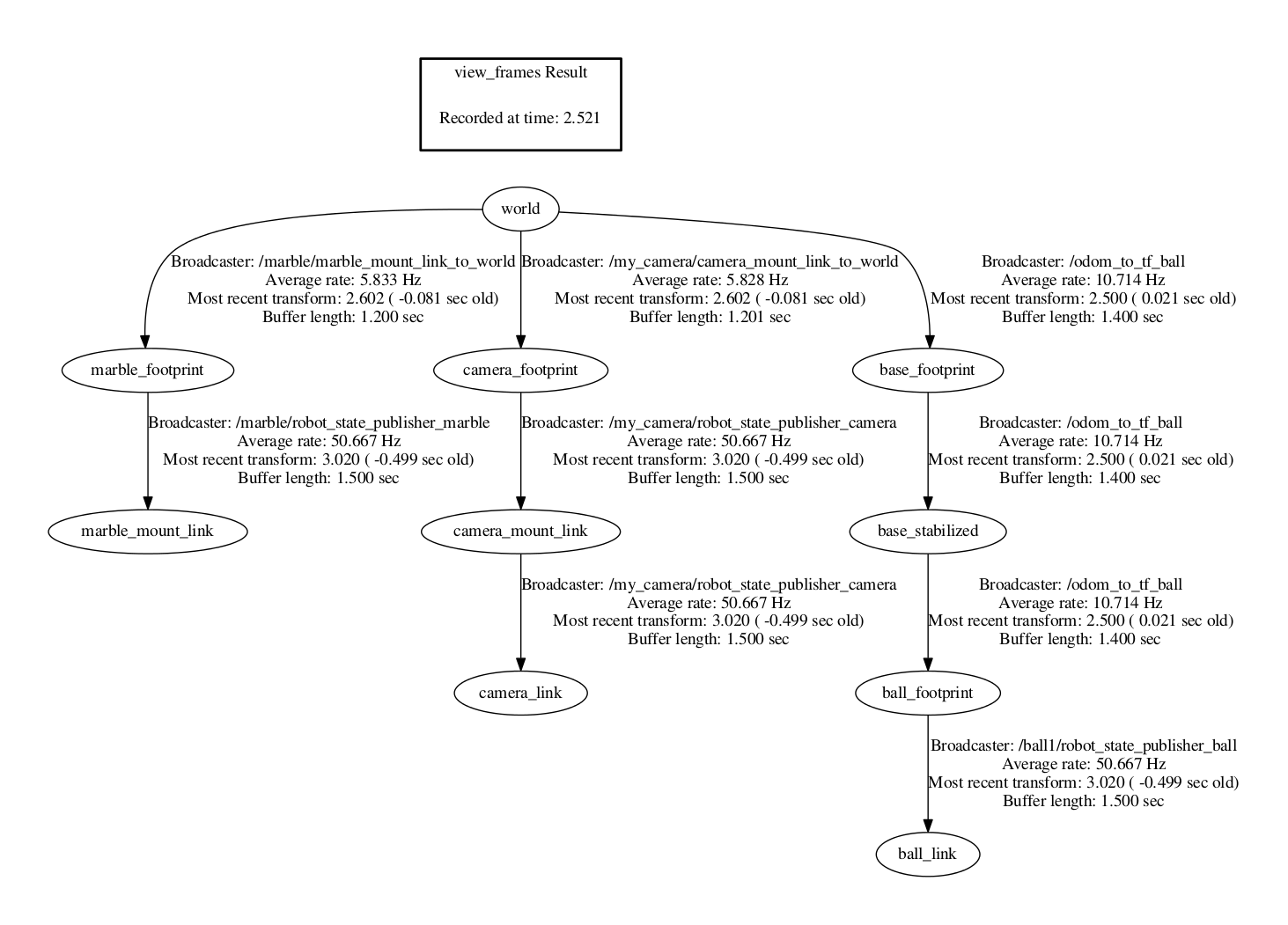
-> the world frame update rate should always be the fastest????
2) I did not set a seq in the header???
3) rosrun tf tf_monitor camera_link world
RESULTS: for camera_link to world Chain is: camera_link -> camera_mount_link -> camera_footprint -> world Net delay avg = -0.0952712: max = 0

Can you give us some more details, what is the type of the message you are transforming and what code are you using to transform it. The magnitude of the velocity should be constant so there is definitely something wrong.
Another comment about the rates shown by
rosrun tf view_frames. The rates are not attached to the frames but to the relationships between them. There is not particular reason why any of them have to be faster or slower than any others.