
Is it possible with ROS2 to send and recieve UDP messages to a certain IP address ?
Would it be possible to send and recieve ROS2 messages to a certain ip address ?
e.g. I have a ROS2 listener node which can subscribe messages from a certain IP address and then do some calculations and publish the message to the same IP address.
NOTE : THE OTHER SYSTEM IS NOT A ROS NODE RATHER ANOTHER TOOL.
EDIT:
I have attached a picture to make it understand better.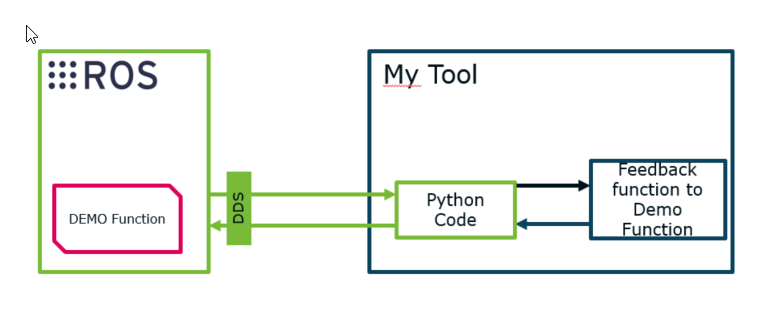 Basically it is ROS2 instead of ROS. There is one node in ROS2 performing some calculations with the help of the values coming from another function that is my own simulation tool. Now i want to exchange data between ROS2 and the simulation tool through DDS. In the tool there is a possiblity to integrate any external tool (in this case ROS2) through the
Basically it is ROS2 instead of ROS. There is one node in ROS2 performing some calculations with the help of the values coming from another function that is my own simulation tool. Now i want to exchange data between ROS2 and the simulation tool through DDS. In the tool there is a possiblity to integrate any external tool (in this case ROS2) through the python code. What is the best aproach to do this ?

