
How can I stop the map rotating
I trying to mapping. my rplidar is a2, and using hector slam and my robot is a drone.
this link is my mapping test video
that is wrong
probably I think that rplidar or drone don't recognize the direction of my robot during drawing the map
I want to drawing the map like this link
I use default launch file in rplidar_ros, hector_slam
(rplidar_ros/launch/view_rplidar.launch & hector_slam/hector_mapping/launch/mapping_default.launch)
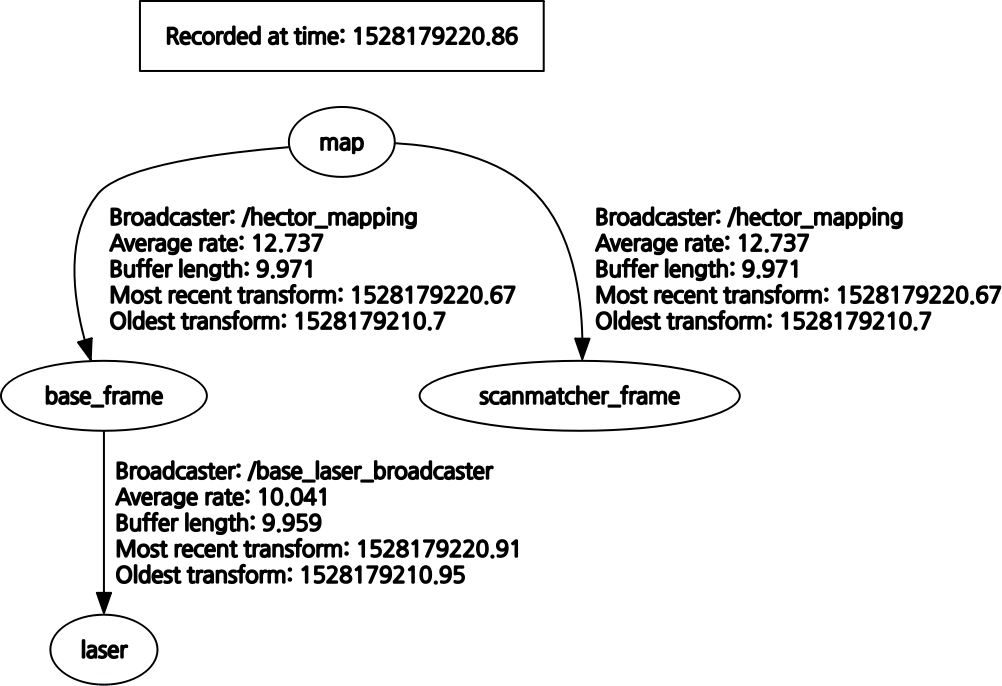
my tf tree picture
If rplidar knows the direction of rotation of the drone, I can solve it.
but I don't know the way of it
How can I get some rotating direction information of drone?
or is it problem that rotating rplidar?
please some advice
I have to solve this problem .
edit)
What is hector_pose_estimation ? What is the purpose and how do I use it?

check the tf between map and other link using 'rosrun rqt_tf_tree rqt_tf_tree`
Post your result for 'rosrun rqt_tf_tree rqt_tf_tree' and rqt_graph. Possibly wrong tf tree.
sorry to late attach tf tree screen shot
https://answers.ros.org/question/2904...
please see picture of this link. it is my tf tree