
Turtlebot3 Waffle treats the camera as an obstacle during Virtual SLAM

Hi all,
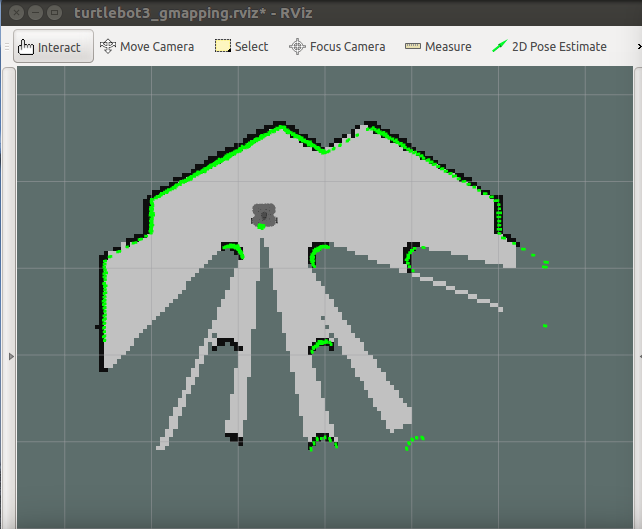
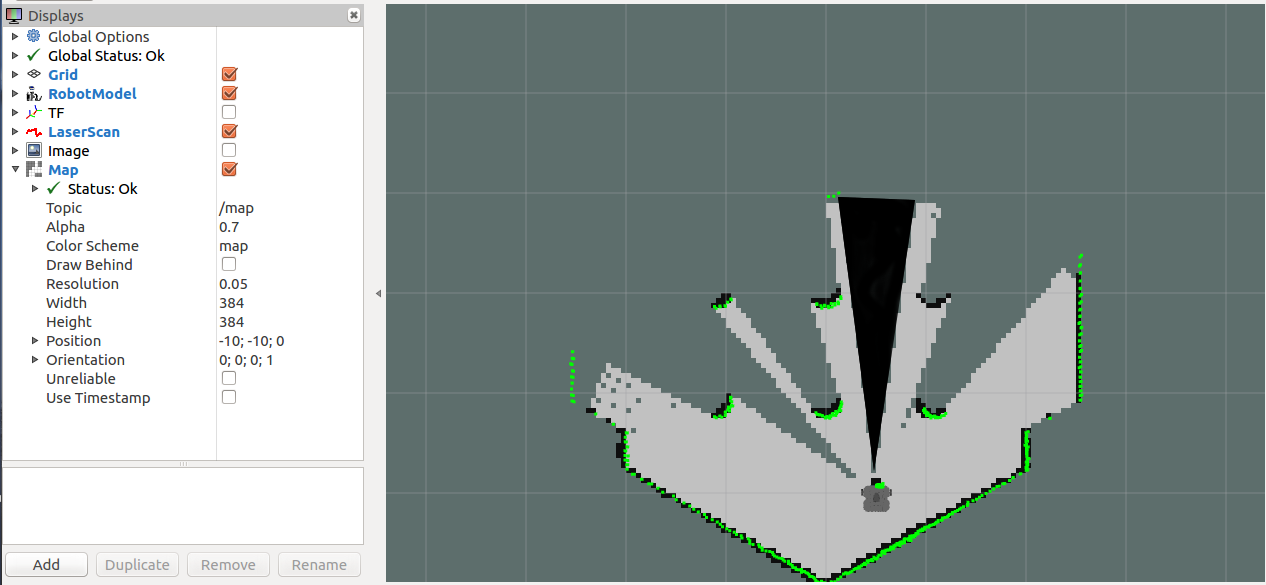
I realized that the Turtlebot3 waffle treats the camera as an obstacle during virtual SLAM. Below you can find two visuals. (I shared them through my Google Drive.) The first one shows the Turtlebot3 doing virtual SLAM. Please notice the unexplored region in front of the robot, this region is marked in the second visual. As it can be seen the robot detects an obstacle on its chassis, looking at the physical Turtlebot that I have, I presume this is the camera. The obstacle that it is detecting on top of itself remains constant when it moves. Also, the SLAM performance is quite poor compared to the actual robot. I reckon this issue might be playing a role.
The package I used is: turtlebot3_slam
My OS and PC specs are:
- Ubuntu 16.04.4 LTS \n \l
- 4.13.0-45-generic
- 64-bit machine
I was wondering if this is a known issue? How can I solve this issue?

I've given you some karma, can you please attach the images to your question?
Can you please attach your images vs. providing a link to them? That way the question is self-contained.
TurtleBot3 Issue might be help you