
bridging the gap between two tf trees
Hello! I am attempting to run a swarm of turtlebot3s from my Ubuntu16.02. I have added namespaces and tf_prefix to relevant .launch files. It seems as though no matter what I change, I can't seem to get rviz to pick up the proper transform, as shown in the following picture: 
and I discovered from view_frames that my two tf trees are persisting as shown here: 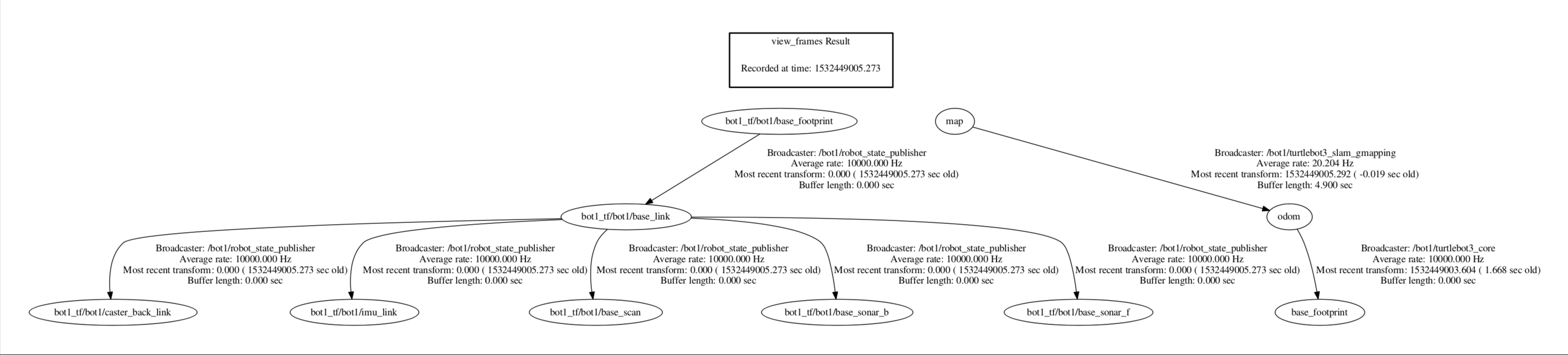 .
.
Is the only way to fix this by publishing a transform to bridge the two base_footprints? Is this even possible? Sorry - this is all still very new to me and the other questions went over my head a little bit. Anyway, thank you for any advice you can offer!
add a comment

