
Why odom frame will move away from map frame? [closed]
I run slam_gmapping with real robot controlled by joystick using laser range finder(3~4m).
Rviz shows:
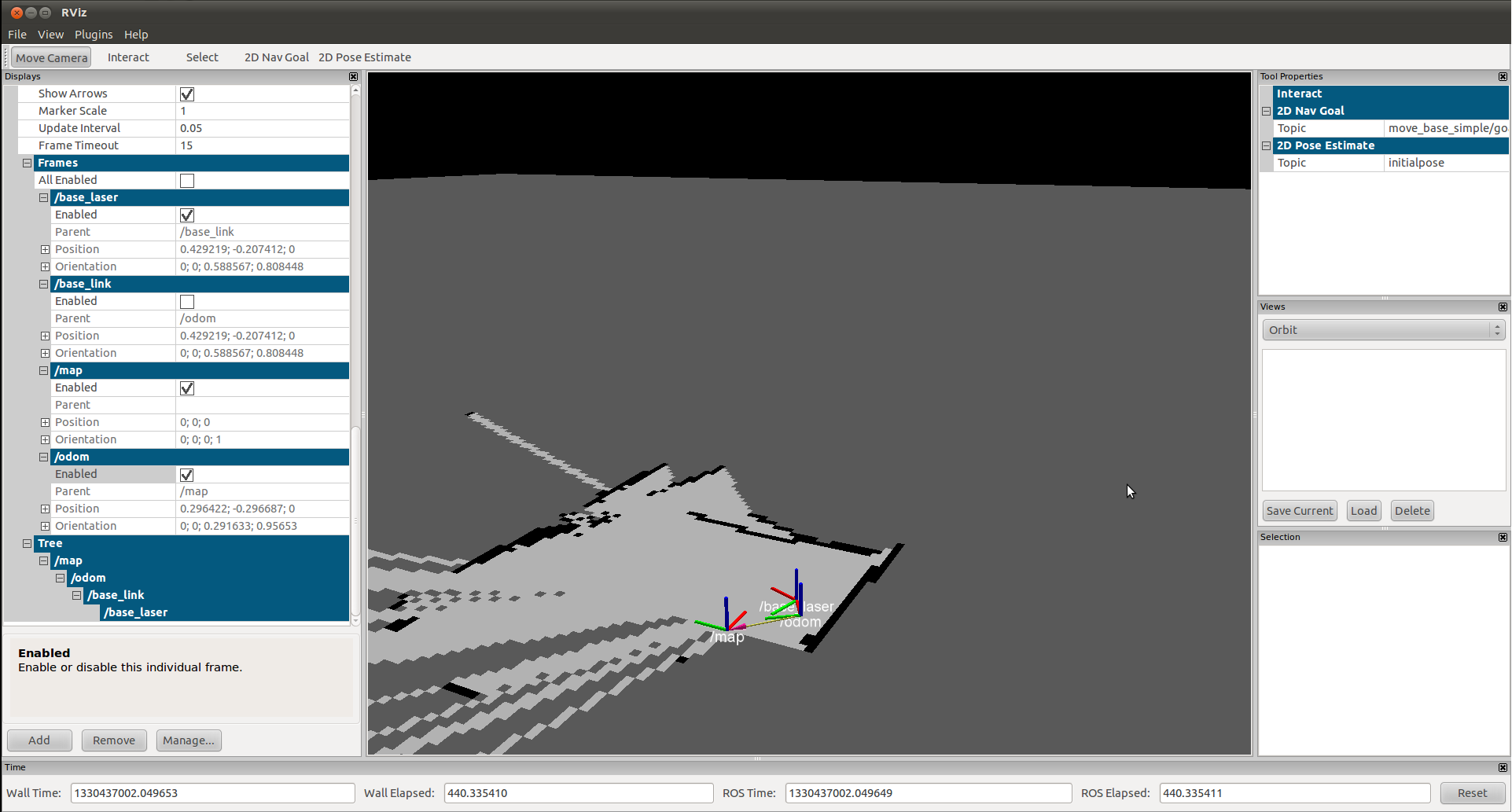
What I know is odom frame should always at the same starting point of map frame, because odom frame is a coordinate that generated when robot start and shouldn't be moved.
Where am I wrong? Thank you~

Duplicate question, see http://answers.ros.org/question/10302/the-tf-between-map-and-odom-is-not-static#15185