
How to localize using 3D data projected on 2D map with kinect?
I am using Octomap for slam and saving the 3d map as a 2d projected map. Now during autonomous navigation the global map i have selected is the 2D projected map, but the robot robot is using the 2D laserscan data for local costmap
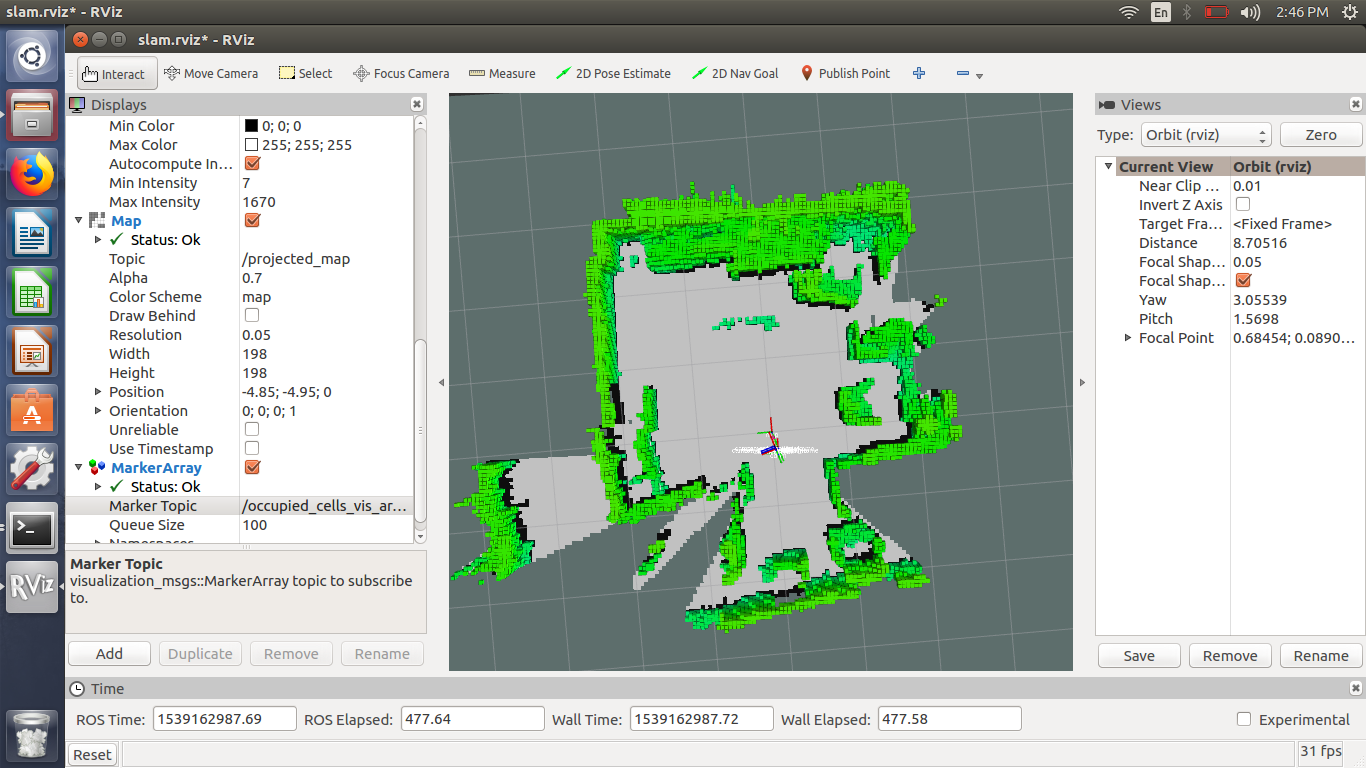
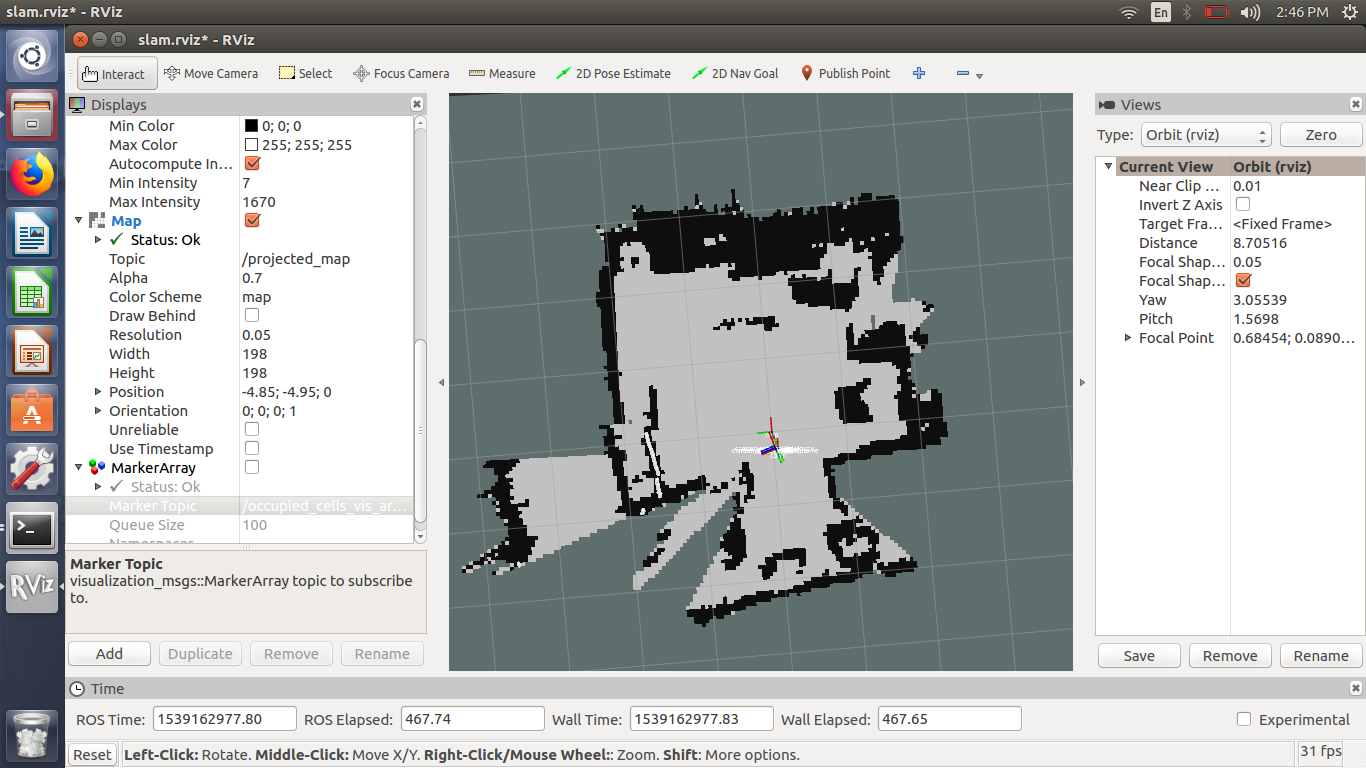 is there any way for localization using the the projected data?
is there any way for localization using the the projected data?
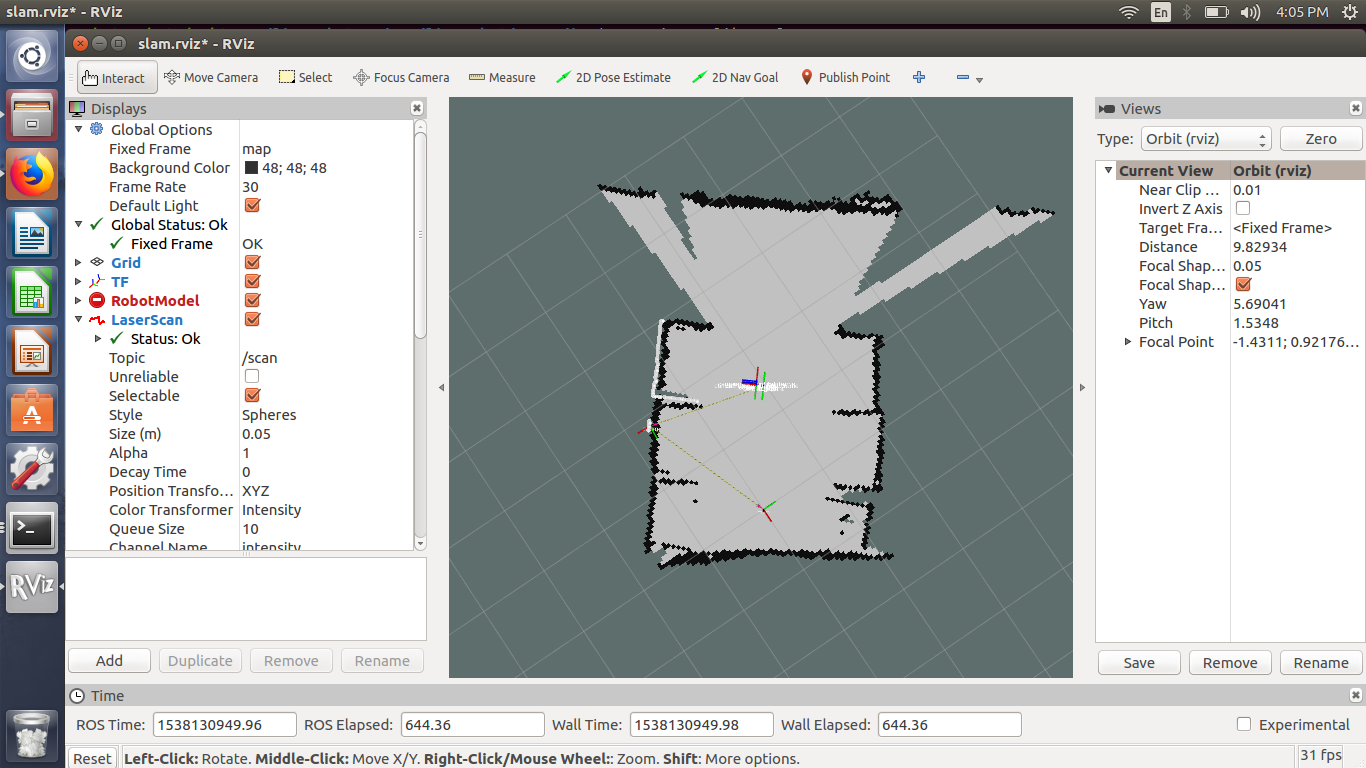
I dont have an image of the simple 2D map of the same room but it is similar to this
add a comment
