
ABB IRB120 different in Rviz from Virtual machine than Dual boot
Hello,
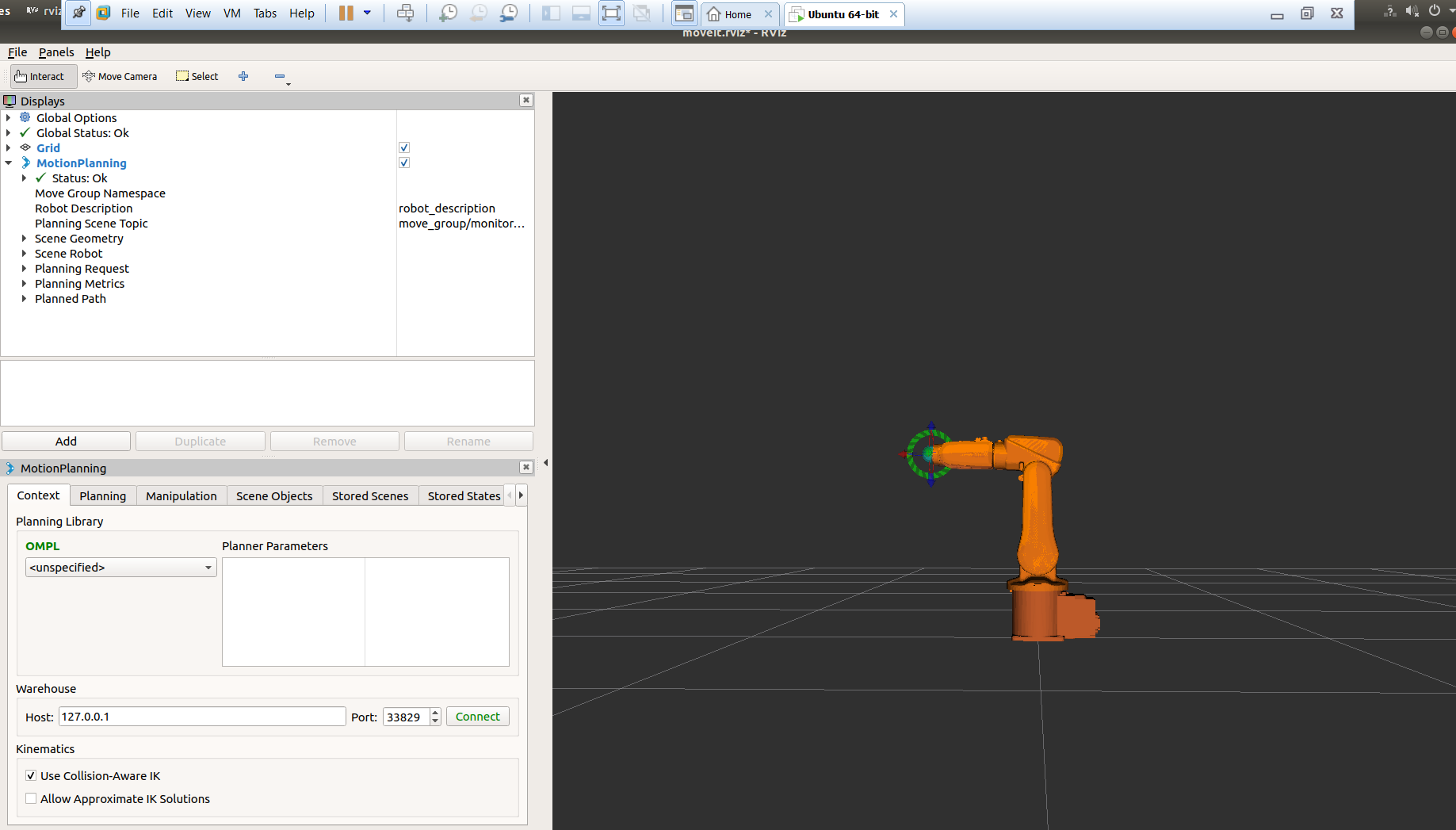
I'm trying to get my ABB IRB120 loaded in Rviz. Everything works fine. I used to work in a virtual machine using Ubuntu 18.04. When I loaded the demo.launch from the abb abb_experimental package ( https://github.com/ros-industrial/abb... ), it works fine. But the Virtual machine is a bit slow, so I decided to run a dual boot.
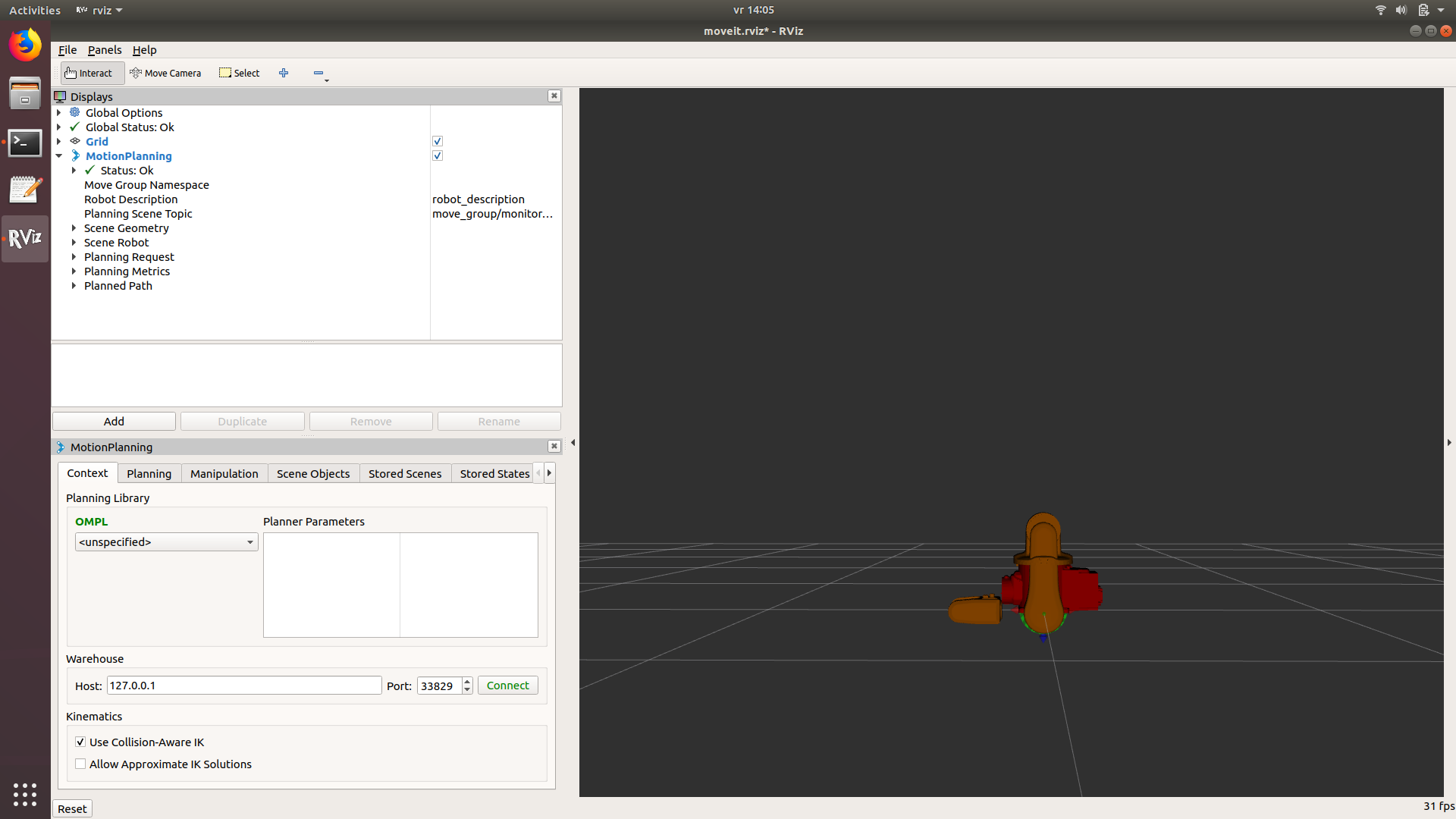
When I do the exact same things as on the virtual machine, I got a different result in my Rviz. My question is, how can I fix this?
In the link you can see the 2 pictures. I'm using Ubuntu 18.04 on both systems and ROS Melodic.
EDIT:
Picture 1: Rviz on the virtual machine
Picture 2: Rviz on the dual boot
EDIT2:
This is the terminal output after the demo.launch:
> ... logging to /home/redouan/.ros/log/9b89edba-e120-11e8-8b50-dc85def7897f/roslaunch-Redouan-17074.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://Redouan:42491/
SUMMARY
========
PARAMETERS
* /joint_state_publisher/use_gui: False
* /move_group/allow_trajectory_execution: True
* /move_group/controller_list: [{'joints': ['joi...
* /move_group/jiggle_fraction: 0.05
* /move_group/manipulator/longest_valid_segment_fraction: 0.005
* /move_group/manipulator/planner_configs: ['SBLkConfigDefau...
* /move_group/manipulator/projection_evaluator: joints(joint_1,jo...
* /move_group/max_range: 5.0
* /move_group/max_safe_path_cost: 1
* /move_group/moveit_controller_manager: moveit_fake_contr...
* /move_group/moveit_manage_controllers: True
* /move_group/octomap_resolution: 0.025
* /move_group/planner_configs/BFMTkConfigDefault/balanced: 0
* /move_group/planner_configs/BFMTkConfigDefault/cache_cc: 1
* /move_group/planner_configs/BFMTkConfigDefault/extended_fmt: 1
* /move_group/planner_configs/BFMTkConfigDefault/heuristics: 1
* /move_group/planner_configs/BFMTkConfigDefault/nearest_k: 1
* /move_group/planner_configs/BFMTkConfigDefault/num_samples: 1000
* /move_group/planner_configs/BFMTkConfigDefault/optimality: 1
* /move_group/planner_configs/BFMTkConfigDefault/radius_multiplier: 1.0
* /move_group/planner_configs/BFMTkConfigDefault/type: geometric::BFMT
* /move_group/planner_configs/BKPIECEkConfigDefault/border_fraction: 0.9
* /move_group/planner_configs/BKPIECEkConfigDefault/failed_expansion_score_factor: 0.5
* /move_group/planner_configs/BKPIECEkConfigDefault/min_valid_path_fraction: 0.5
* /move_group/planner_configs/BKPIECEkConfigDefault/range: 0.0
* /move_group/planner_configs/BKPIECEkConfigDefault/type: geometric::BKPIECE
* /move_group/planner_configs/BiESTkConfigDefault/range: 0.0
* /move_group/planner_configs/BiESTkConfigDefault/type: geometric::BiEST
* /move_group/planner_configs/BiTRRTkConfigDefault/cost_threshold: 1e300
* /move_group/planner_configs/BiTRRTkConfigDefault/frountier_node_ratio: 0.1
* /move_group/planner_configs/BiTRRTkConfigDefault/frountier_threshold: 0.0
* /move_group/planner_configs/BiTRRTkConfigDefault/init_temperature: 100
* /move_group/planner_configs/BiTRRTkConfigDefault/range: 0.0
* /move_group/planner_configs/BiTRRTkConfigDefault/temp_change_factor: 0.1
* /move_group/planner_configs/BiTRRTkConfigDefault/type: geometric::BiTRRT
* /move_group/planner_configs/ESTkConfigDefault/goal_bias: 0.05
* /move_group/planner_configs/ESTkConfigDefault/range: 0.0
* /move_group/planner_configs/ESTkConfigDefault/type: geometric::EST
* /move_group/planner_configs/FMTkConfigDefault/cache_cc: 1
* /move_group/planner_configs/FMTkConfigDefault/extended_fmt: 1
* /move_group/planner_configs/FMTkConfigDefault/heuristics: 0
* /move_group/planner_configs/FMTkConfigDefault/nearest_k: 1
* /move_group/planner_configs/FMTkConfigDefault/num_samples: 1000
* /move_group/planner_configs/FMTkConfigDefault/radius_multiplier: 1.1
* /move_group/planner_configs/FMTkConfigDefault/type: geometric::FMT
* /move_group/planner_configs/KPIECEkConfigDefault/border_fraction: 0.9
* /move_group/planner_configs/KPIECEkConfigDefault/failed_expansion_score_factor: 0.5
* /move_group/planner_configs/KPIECEkConfigDefault/goal_bias: 0.05
* /move_group/planner_configs/KPIECEkConfigDefault/min_valid_path_fraction: 0.5
* /move_group/planner_configs/KPIECEkConfigDefault/range: 0.0
* /move_group/planner_configs/KPIECEkConfigDefault/type: geometric::KPIECE
* /move_group/planner_configs/LBKPIECEkConfigDefault/border_fraction: 0.9
* /move_group/planner_configs/LBKPIECEkConfigDefault/min_valid_path_fraction: 0.5
* /move_group/planner_configs/LBKPIECEkConfigDefault/range: 0.0
* /move_group/planner_configs/LBKPIECEkConfigDefault/type: geometric::LBKPIECE
* /move_group/planner_configs/LBTRRTkConfigDefault/epsilon: 0.4
* /move_group/planner_configs/LBTRRTkConfigDefault/goal_bias: 0.05
* /move_group/planner_configs/LBTRRTkConfigDefault/range: 0.0
* /move_group/planner_configs/LBTRRTkConfigDefault/type: geometric::LBTRRT
* /move_group/planner_configs/LazyPRMkConfigDefault/range: 0.0
* /move_group ...
Could you please attach your images directly to this post? I've given you enough karma to do that.
If you would
acceptthe answer to your previous question (#q305835) you would already have had enough karma.I edited the pictures above.
That's great. What about #q305835?
I'm still stuck at this question. I only added the pictures in the question. Do you know anything how I can resolve this?
About #q305835: I was very busy lately, but I wil try it next week or the week after. I will let you know if it worked.
I'm confused: #q305835 asks how to install and use the packages under Melodic. Your current question is also about Melodic. Have you figured out how to use the packages under Melodic (and this resolved #q305835) or not?
As to this question: you should update your question with the commands you use to start everything. The screenshots are nice, but don't really tell us that much.
I'm sorry for the confusion. #q305835 is about the connection with the real robot. I understand the package partly. Next week I will try to connect it to te real robot.
But this question is about the simulation of the robot.
On both systems I used the following command: roslaunch abb_irb120_moveit_config demo.lauch. On the Virtual machine it ended up as in pic 1 and on the dual boot it ended up as in pic 2.
Does this clear anything up?