
Point cloud data appears larger than it should be in rviz
Hello all,
I hope some of you may help me to understand the following two problems:
- I wonder if you may help me to understand why the point cloud information is way larger than it should be? Here is the point cloud data shown in rviz:
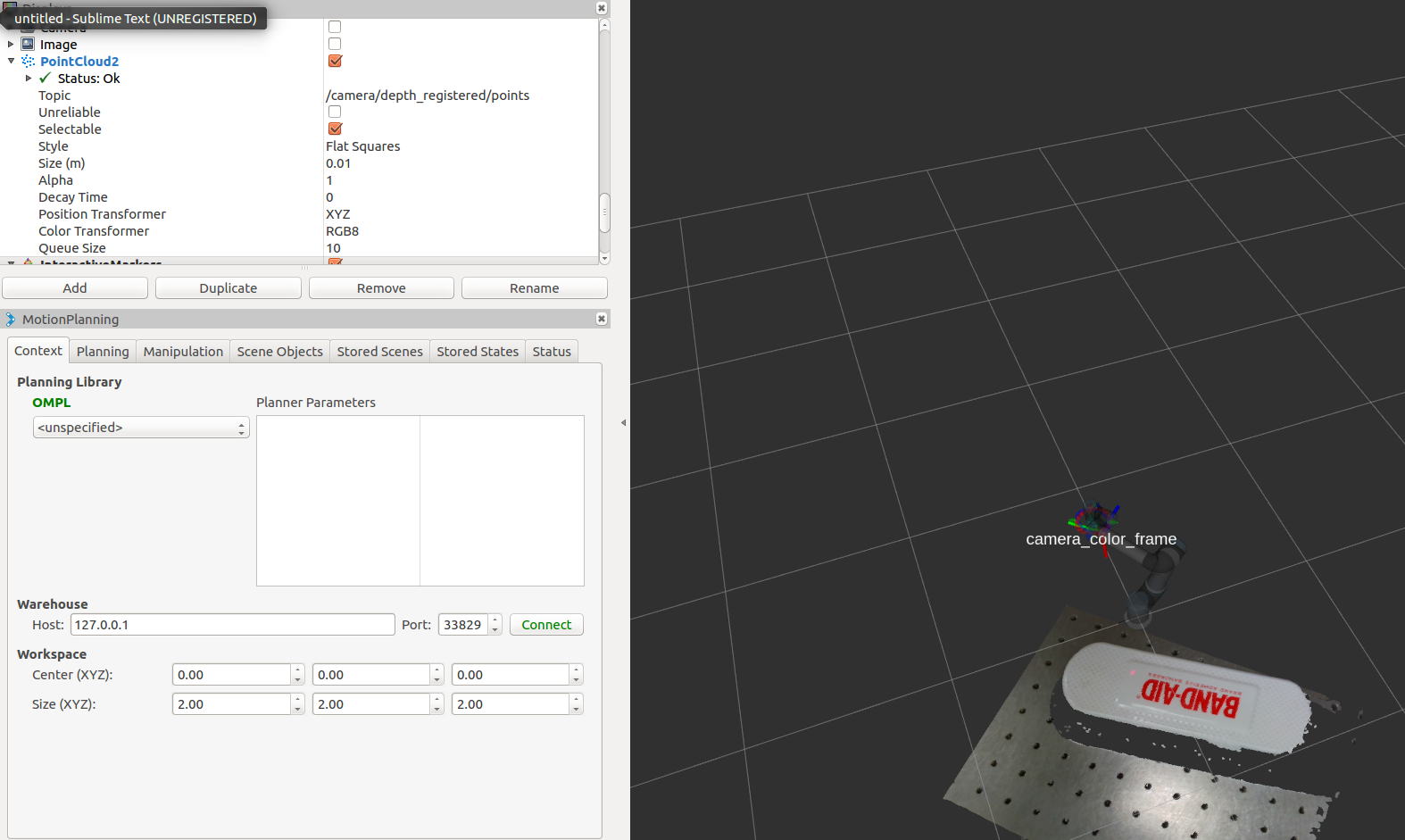
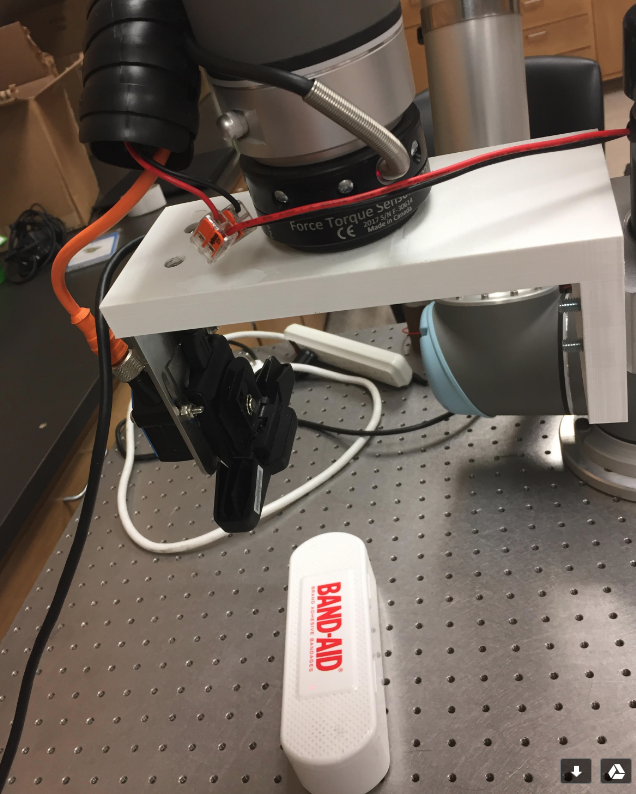
The band-aid box is even larger than the UR5 robot :) I'm also posing one additional image to show the real size
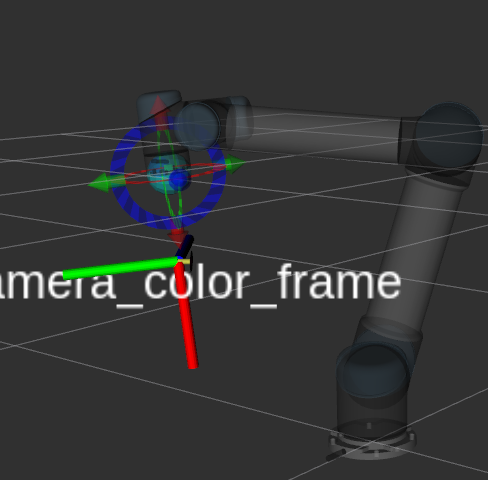
- Why the point cloud info is not displayed on the same level as the robot base? I have calibrated the camera frame with respect to the robot base as shown below, all I did is subscribing to the depth_registration/points. However, the band-aid box is far below to the robot base as shown in the first Fig. Is this normal?
Thank you for your time and help. Really appreciate it.

Can you give us further information about the camera? (Which one is, which code are you using to generate the Pointcloud...). What it seems for me is a scaling problem (maybe from the ur instead of the pointcloud?).
just a fast check. Look in your urdf file if inside the tags named mesh you can find scale values (like in the first response here https://answers.ros.org/question/2734...). If you find them, try to remove them.