
AMCL does not localise
I am running the AMCL package but for some reason it cannot localise the robot even though it receives the laser beams and the map is given.
Here is my launch file of AMCL:
<arg name="scan_topic" default="/scan"/>
<node pkg="amcl" type="amcl" name="amcl">
<param name="base_frame_id" value="base_footprint"/>
<param name="use_map_topic " value="false"/>
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.2" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="30"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="odom_frame_id" value="odom"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.1"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
</node>
Here is the bag file: LINK
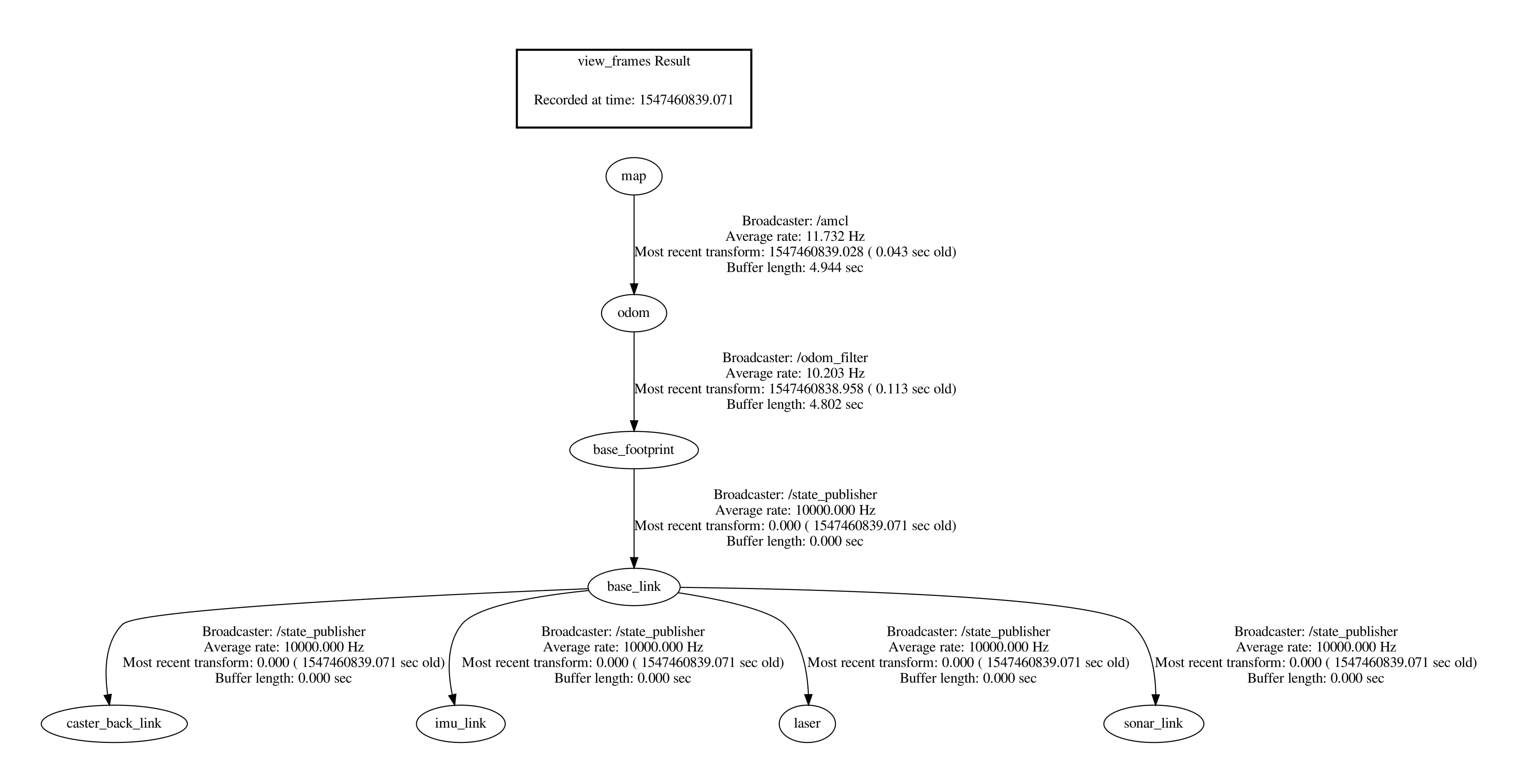
Here is my TF tree:
Can someone point what am I doing wrong?

Isn't this a duplicate of #q312676?
@gvdhoorn I thought I have deleted that question as I have asked two questions there and made this one cleaner
@gvdhoorn For some reason I press delete and nothing happens
I've deleted it for you.
I'm not sure how your current question is "more clean" or clearer? I expect people to start asking you for a screenshot showing what the problem is, and/or your TF tree, etc.
You had all that in #q312676.
@gvdhoorn Good point, I have added the TF. I think bagfile is much more useful than a screenshot and screenshot might be slightly misleading in this case.