
Poor quality maps produced from odometry based slam algorithms tested in real TurtleBot
We are currently testing several slam algorithms in a real TurtleBot(ROS Kinetic). Despite the fact that everything seems to be working fine on TurtleBot we have come across a problem on the maps coming from odometry based slam algorithms. Although we changed the TurtleBot base to figure out whether the base had hardware or odometry issues, the maps remained the same. The lidar we use has maximum range up to 17m.
Gmapping (using odometry)
We tested gmapping with these parameters:
<launch>
<arg name="scan_topic" default="scan" />
<arg name="base_frame" default="base_footprint"/>
<arg name="odom_frame" default="odom"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="base_frame" value="$(arg base_frame)"/>
<param name="odom_frame" value="$(arg odom_frame)"/>
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="12.0"/>
<param name="maxRange" value="17.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="minimumScore" value="500"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.5"/>
<param name="angularUpdate" value="0.436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="200"/>
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
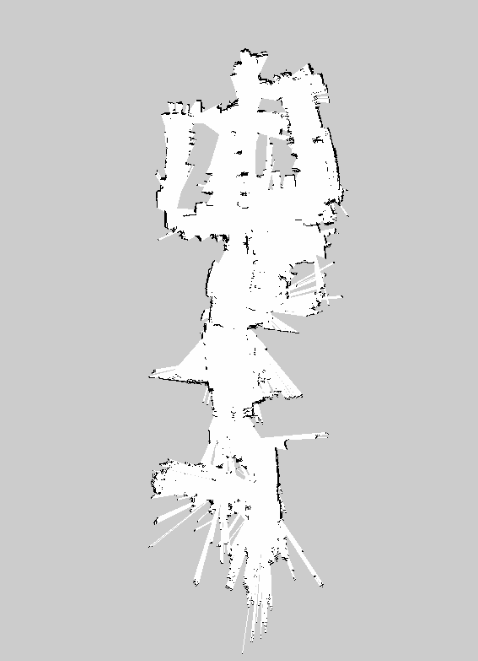
The map from Gmapping tested in the whole lab is the following.
KartoSlam(using odometry)
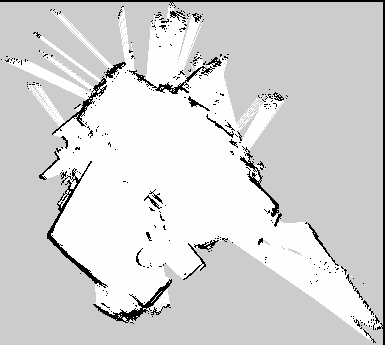
The map produced by KartoSlam tested in a lab's room with the default parameters is the following.
CRSM Slam (no odometry used)
The map produced by CRSM Slam tested in a lab's room, which does not use odometry is the following.
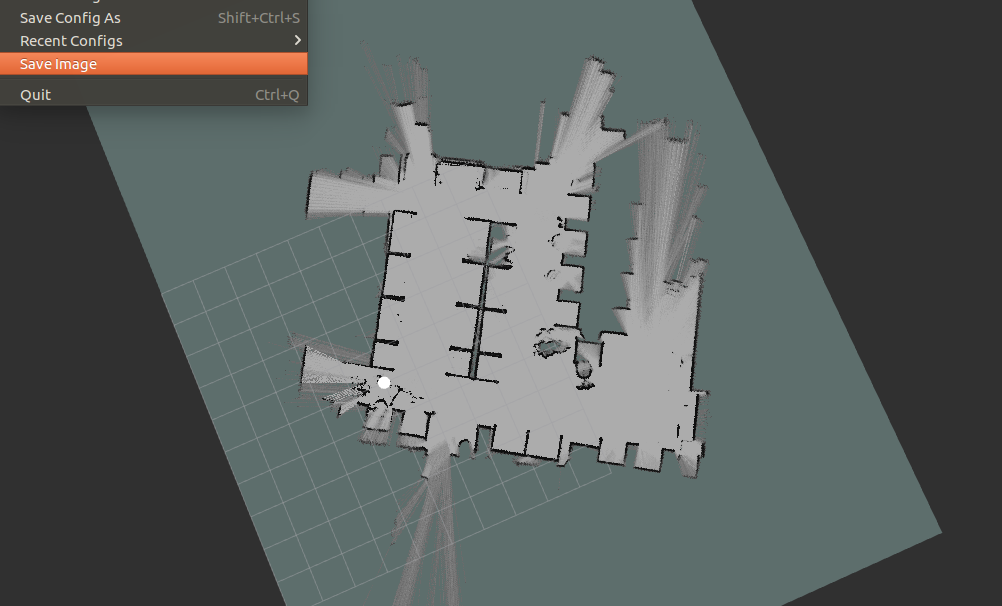 As you can see the CRSM map is far better than the previous two.
As you can see the CRSM map is far better than the previous two.
The questions :
- Where shall we look for the fix, since we have tried the algorithms on two different TurtleBots?
- How could we improve the map quality, since what we get so far is really poor?

Can you please attach your images directly to your post? I've given you sufficient karma to do that.
Thank you very much