
usb_cam artifacts with OV7251

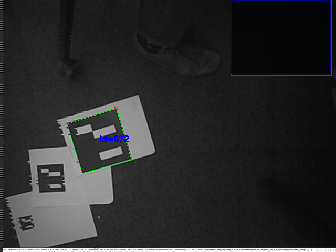
Hi everyone, I have an issue with my OV7251 camera included with the intel Aero. I have found a modified version of USB_cam to read it, but I have some really bad artifacts.
I am not able to specify a framerate too.
When I launch my launch file, I got these errors :
roslaunch usb_cam usb_cam.launch
... logging to /home/uav2/.ros/log/1ac6f612-257e-11e9-974e-6e139e114535/roslaunch-uav2-12040.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://uav2:39573/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.14
* /usb_cam/camera_frame_id: usb_cam
* /usb_cam/framerate: 100
* /usb_cam/image_height: 480
* /usb_cam/image_width: 640
* /usb_cam/io_method: userptr
* /usb_cam/pixel_format: grey
* /usb_cam/sunny_weather: False
* /usb_cam/video_device: /dev/video2
NODES
/
usb_cam (usb_cam/usb_cam_node)
ROS_MASTER_URI=http://localhost:11311
process[usb_cam-1]: started with pid [12057]
[ INFO] [1549035812.797678981]: using default calibration URL
[ INFO] [1549035812.797852272]: camera calibration URL: file:///home/uav2/.ros/camera_info/head_camera.yaml
[ INFO] [1549035812.797983713]: Unable to open camera calibration file [/home/uav2/.ros/camera_info/head_camera.yaml]
[ WARN] [1549035812.798041765]: Camera calibration file /home/uav2/.ros/camera_info/head_camera.yaml not found.
[ INFO] [1549035812.798118867]: Starting 'head_camera' (/dev/video2) at 640x480 via userptr (grey) at 100 FPS
[ WARN] [1549035812.912607171]: Couldn't set camera framerate
[ WARN] [1549035812.925034643]: Failed to open /dev/video2: Device or resource busy
[ WARN] [1549035812.933448378]: Failed to open /dev/video2: Device or resource busy
What can I do to avoid it or improve my image ?
I need it to detect Aruco markers, svo and object detection.
add a comment
