
Max velocity of cartesian path setting
I have calculated a trajectory for my robot with move_group.compute_cartesian_path(..). Everything seems normal so far.
Related to this question: question. I was wondering if this is added so far?
It is very important that the end effector of my robot has a constant velocity.
Calculated velocity of end effector looks like this:
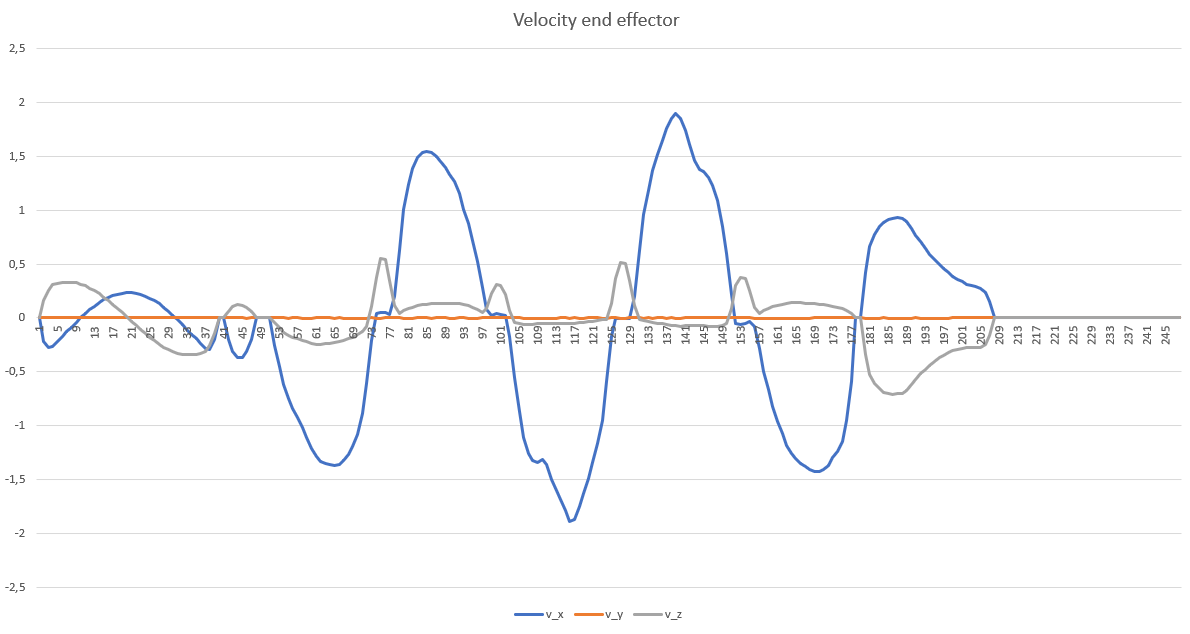
Is there a way to set a parameter to get a constant velocity of end effector?
add a comment
