
Intersection is not mapped properly in hector_mapping
Hi all, I am trying to map a tunnel using hector_mapping. While the mapping works well throughout the tunnel, it is missing the junction. The tunnel is not planner. There are some elevations present through its path. Is this why the map is not properly generated? Any clue how to fix this?
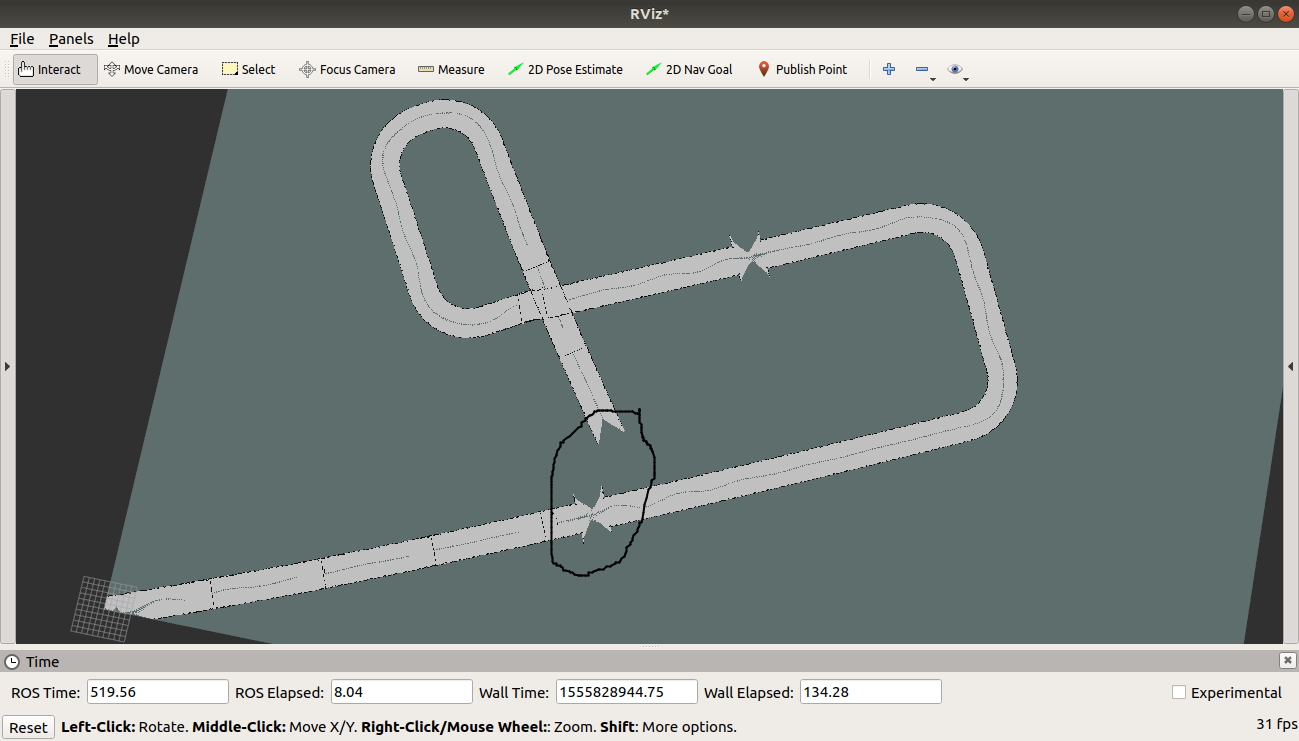
The generated map is attached (intersection is marked). I am using ros melodic with Ubuntu 18.04.

If its not planar, that could be possible, yes. Also HectorSLAM unless its changed, from my knowledge doesn't have loop closure capabilities. So if you drift too much in odometry its not going to close on a completed loop. Try slam karto.
Or Google's Cartographer. For an odometry-only 2D map in a non-planar environment (with probably not too many features) this is actually quite a decent result I believe.
Yeah I agree. It looks like there were just 2 areas where it messed up (around the 3rd turn and in the intersection) but otherwise may have been ~1%.
Thanks a lot guys for your advice. I will definitely try both of them. And share the results as well.
The junction after 2nd turn is actually an overlap of the same path (due to elevation). That is another issue there.
So is there any way to build 3d map (with the elevation details as well)?