
Need help with cartographer_ros
Hey all, I was trying to build 3D map using catographer_ros. I am very much new to this. So I have the below observations. I was able to manage to view the map on rviz. I am attaching it below.
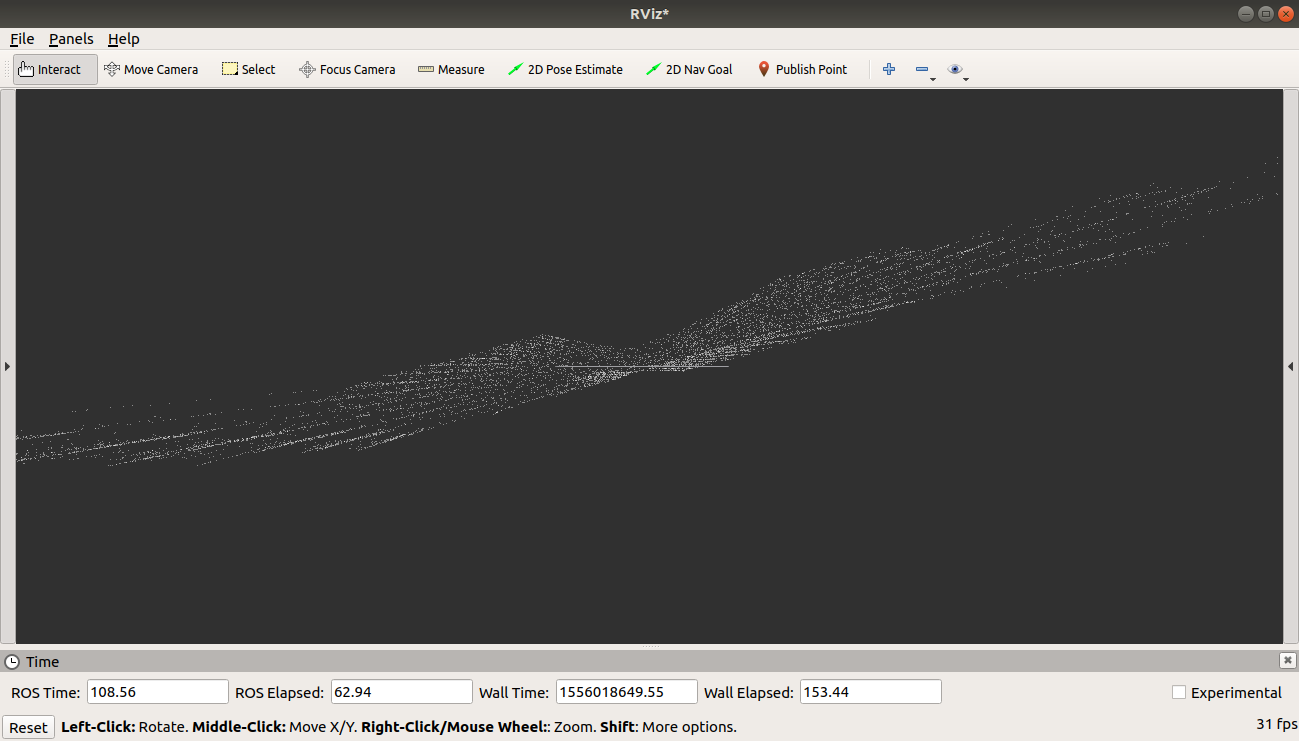
a. Side view
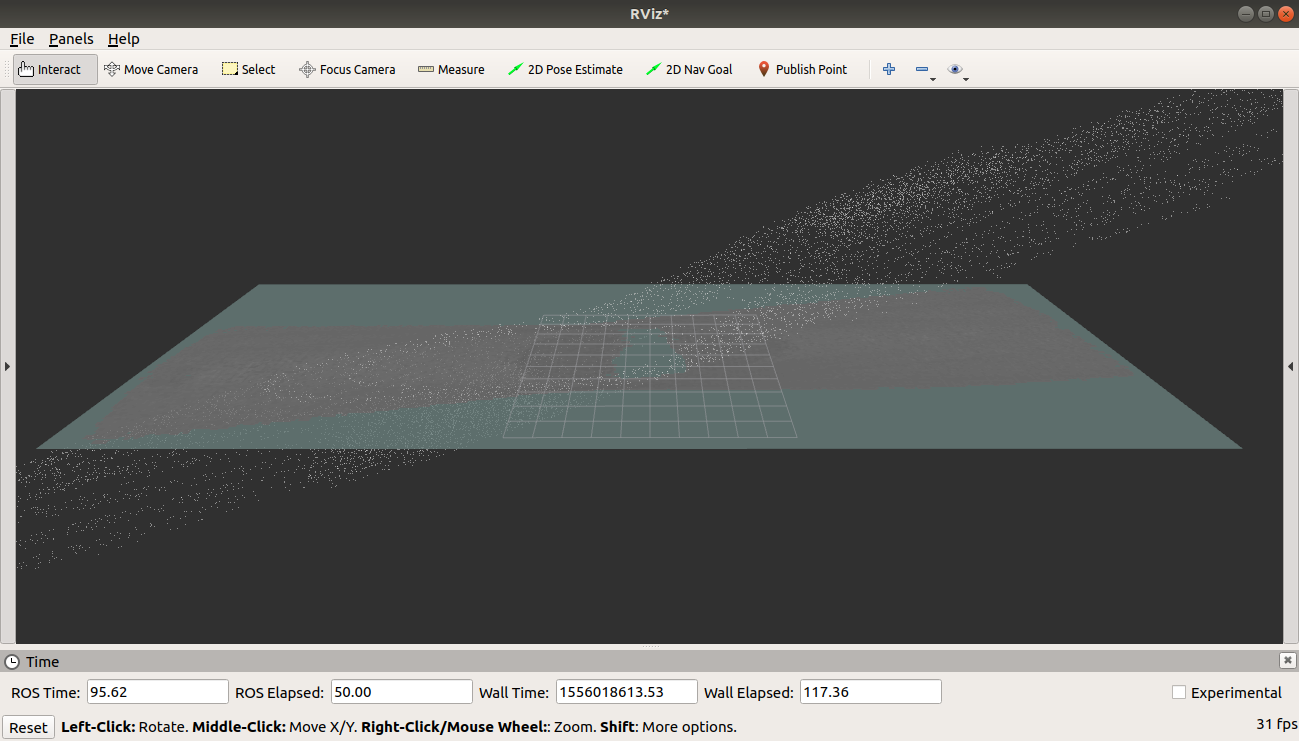
b. Top view (red shades are from /map and points are from /scan_matched_points2 topic)
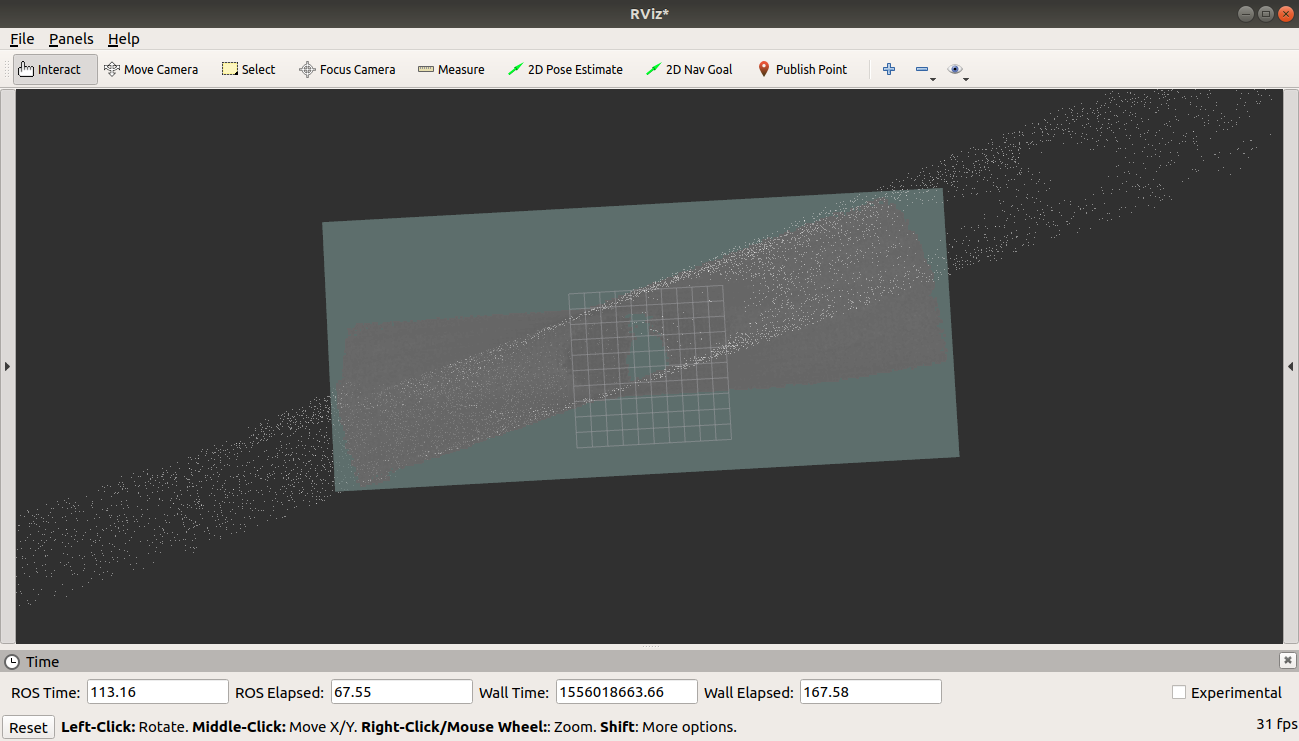
c. Some random view
I can see this only throughout my path. So my understanding is below,
It is showing the data only for that instance. It is not building the whole map (as hector_mapping does). Correct me if I am wrong.
The map remains tilted like that. Not sure why it remains like that and how to fix.
Now I am coming to my goal.
I want to save the complete 3D map of the tunnel. I am following the link ( https://google-cartographer-ros.readt... ). So is it necessary to have both .bag and .pbstream file to build the complete map?
If the answer is 'yes', will I see the whole 3D map after it?
If anyone can provide any simple tutorial, that would be great.
