
tf2 setup for Cartographer-ROS
Hi,
(This is a conceptual question; no specific code or software version.)
I'm trying to use Cartographer-ROS to do SLAM (Simultaneous Location and Mapping) on sensor data in a .bag file. I can run the 2D backpack example with the command:
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
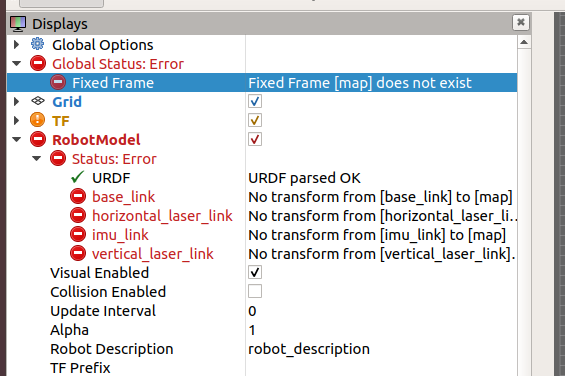
But when I substitute my .bag file, I get errors related to frames and transforms:
The tutorials don't seem to cover this situation, where there's just sensor data and no robot. Also it's puzzling why it works with the demo .bag file but not mine. I know transforms and programming; I just have a conceptual gap in how/why transforms are used in this situation in ROS.
Can anyone tell me what (in general) needs to be done to provide the missing transforrms?
Thanks! Alan

OK, found my first error: Using the 2D backpack demo .launch and .lua files instead of creating my own, as described in https://buildmedia.readthedocs.org/me...
Getting fewer error messages:
The example doesn't give any guidance whether to use /tf messages or a .urdf description. Nothing shows up in RViz.