
Problem with sw_urdf_exporter
hello everyone,
I have a proplem with sw_urdf_exporter tool.
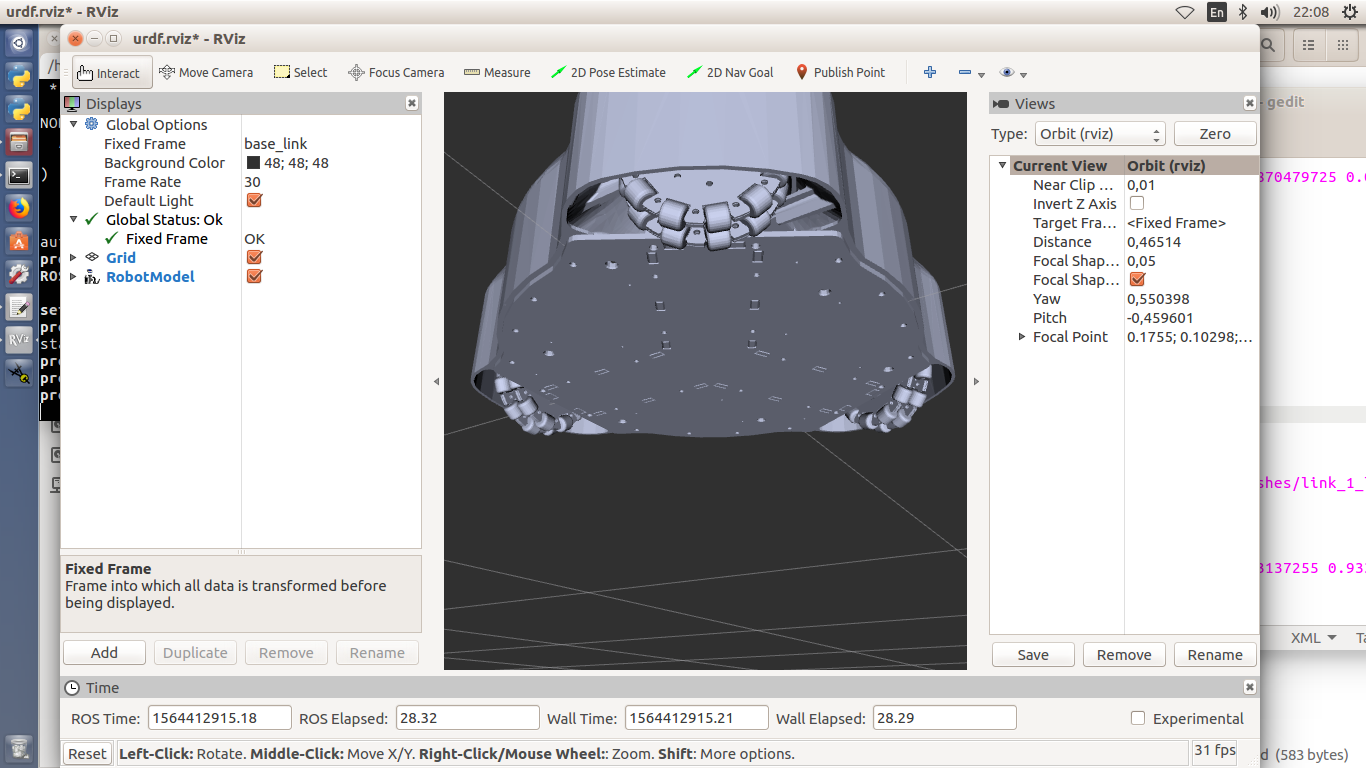 the first picture which is loaded robot in rivz. it is ok.
the first picture which is loaded robot in rivz. it is ok.
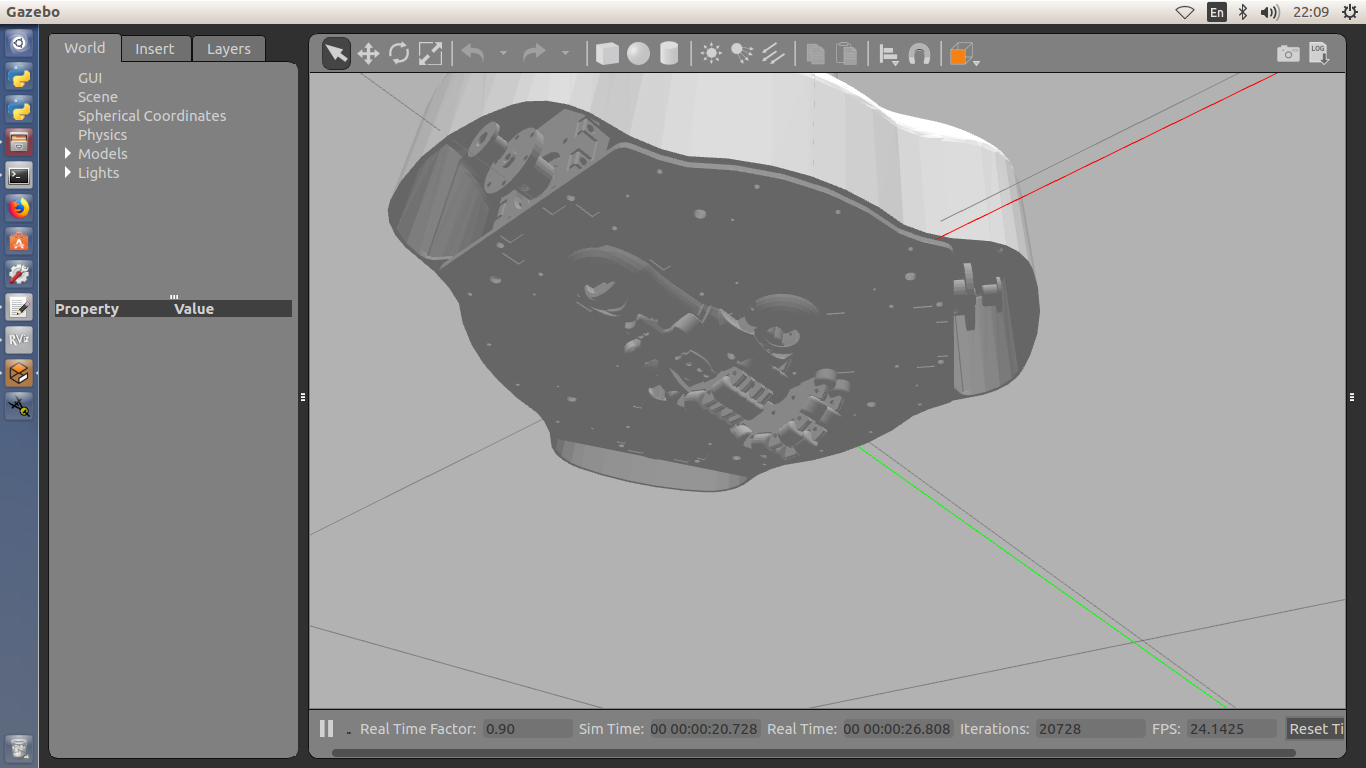 the second picture which is loaded robot in gazebo. the link and joint are fail.
How can I fix this problem?
thank you.
the second picture which is loaded robot in gazebo. the link and joint are fail.
How can I fix this problem?
thank you.
add a comment
