
Stage's base_pose_ground_truth rotated pi/2? [closed]

Hi all,
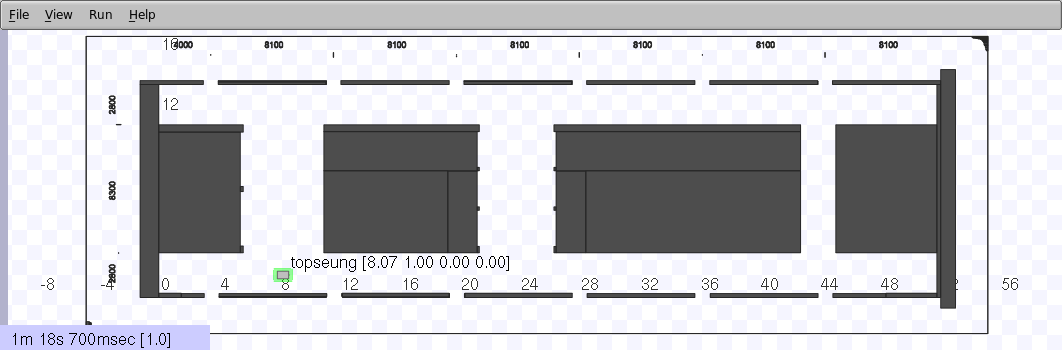
I'm using stage's base_pose_ground_truth to simulate a device and I'm very surprised about the pose it provides, as it looks rotated pi/2 counterclockwise, relative to /map and /odom frames.
For example, in the attached capture the robot is at 8, 1, 0, but base_pose_ground_truth provides:
pose:
pose:
position:
x: 1.0
y: -8.0666666535
z: 0.0
orientation:
x: 0.0
y: 0.0
z: -0.707106781187
w: 0.707106781187
The tf from map to odom is
- Translation: [1.000, 1.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
in RPY [0.000, -0.000, 0.000]
And here is my world file.
include "topseung.inc"
# Definition for an obstacle placed on the map.
define block model
(
size [0.5 0.5 0.5]
gui_nose 0
)
define floorplan model
(
# sombre, sensible, artistic
color "gray30"
# most maps will need a bounding box
boundary 1
gui_nose 0
gui_grid 0
gui_outline 0
gripper_return 0
fiducial_return 0
laser_return 1
)
# set the resolution of the underlying raytrace model in meters
resolution 0.01
interval_sim 100 # simulation timestep in milliseconds
window
(
size [ 1062 350 ]
rotate [ 0.000 0.000 ]
)
# load an environment bitmap
floorplan
(
name "Namsung Plaza 6th floor"
bitmap "../maps/6th_floor_plan_test.bmp"
size [60.11 19.81 0.5]
pose [ 0.0 0.0 0.0 0.0 ]
origin [25.0 7.0 0.0 0]
)
# throw in a robot
topseung
(
pose [ 1.0 1.0 0.0 0.0 ]
name "topseung"
color "gray"
gui_nose 1
)
Any idea of what's going on? I'm really puzzled...

@jorge Which ROS version and which stage are you using ?
ROS electric, Stage-3.2.2