
Global Costmap Detects Obstacle When None is there
I'm running Cartographer on ROS Kinetic on Ubuntu 16.04 using an rplidar as my sensor source.
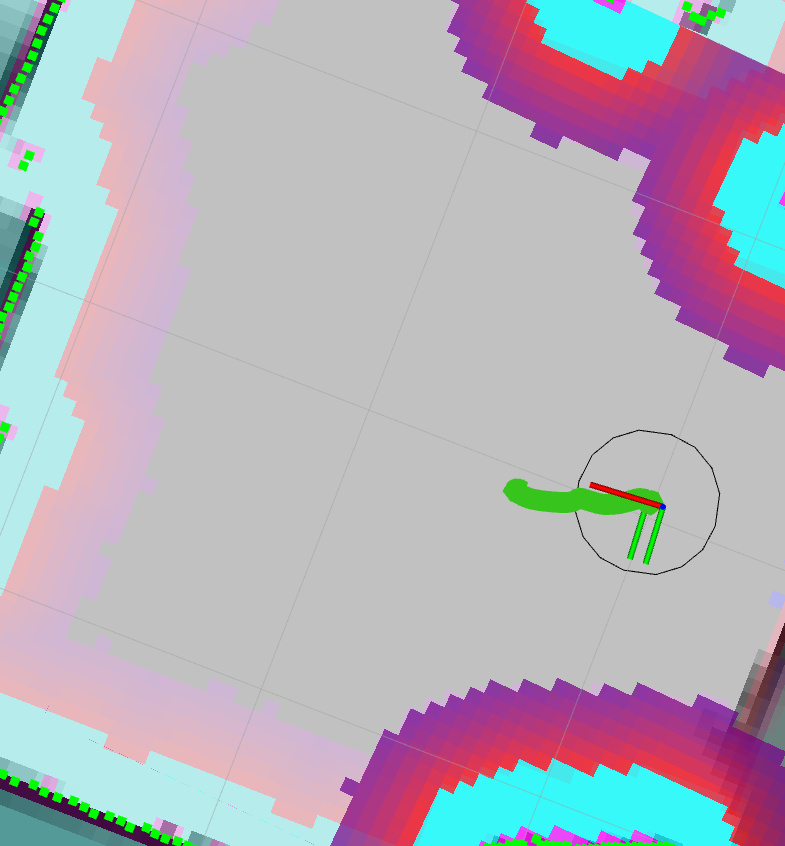
When SLAM is started, everything look normal and clean as shown in the image below.
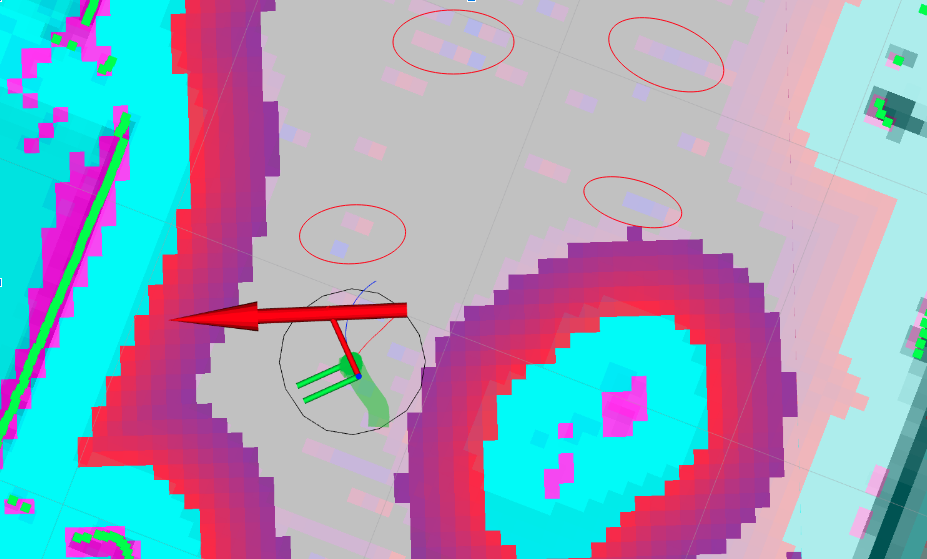
However as the robot moves throughout the environment, I can see small spots, some of which I have highlighted with a red circle , of the Global Costmap that has not been cleared out. This is quite a big issue as it will affect navigation. The path planner will try to avoid these small remnants of the global costmap and also if a navigation goal is set on top of one of these remnants, it will fail.
Here's my global costmap config file:
global_costmap:
## Plugins ##
plugins:
- {name: "static_layer", type: "costmap_2d::StaticLayer"}
- {name: "obstacle_layer", type: "costmap_2d::ObstacleLayer"}
- {name: "inflation_layer", type: "costmap_2d::InflationLayer"}
## Coordinate frame and tf parameters ##
global_frame: "map"
robot_base_frame: "base_footprint"
transform_tolerance: 0.5
## Rate parameters ##
update_frequency: 1.0
publish_frequency: 0.5
## Map management parameters ##
static_map: true
rolling_window: false
origin_x: 0.0
origin_y: 0.0
width: 10.0
height: 10.0
## Map type parameters ##
map_type: "costmap"
### ObstacleCostmapPlugin parameters ###
track_unknown_space: true
footprint_clearing_enabled: true
### Obstacle Layer ###
# ref. http://wiki.ros.org/costmap_2d/hydro/obstacles
obstacle_layer:
## Sensor management parameters ##
observation_sources: "lidar"
lidar:
topic: "/scan_filtered" #scan
sensor_frame: "base_scan" #lidar_frame
observation_persistence: 0.0
expected_update_rate: 0.3 # 0.15 == 6.66 Hz for RPLiDAR
data_type: "LaserScan"
clearing: true
marking: true
max_obstacle_height: 0.4 # RPLiDAR height is 0.35
min_obstacle_height: 0.2
obstacle_range: 5.5 # RPLiDAR effective range is 5.5
raytrace_range: 8.0 # RPLiDAR max range is 8.0
inf_is_valid: true
## Global Filtering Parameters ##
max_obstacle_height: 1.0 # Orbbec-Astra height is 1.3
obstacle_range: 5.5 # maximum range to insert obstacles into the costmap using sensor data
raytrace_range: 8.0 # maximum range to raytrace out obstacles from the map using sensor data
## Misc ##
enabled: true
combination_method: 1 # 1 - maximun
### Static Layer ###
# ref. http://wiki.ros.org/costmap_2d/hydro/staticmap
static_layer:
unknown_cost_value: 255
lethal_cost_threshold: 100
map_topic: "map"
first_map_only: false
subscribe_to_updates: false
track_unknown_space: true
use_maximum: false
trinary_costmap: false
## Misc ##
enabled: true
Any ideas on how to resolve such an issue?

Is that from a map or a costmap? That color scheme implies its a from the costmap, not your cartographer map, unless you're using the costmap coloring for your map-map.
@stevemacenski That's right, it's coming from the global costmap. However it should not be there because there are no obstacles in that area.
@Orl what sensor do you use? Given how frequently
costmap_2dis used in such a use case I doubt that it is a bug. Please share your costmap configuration and, if possible, a bagfile with the sensor data where your issue appears.@mgruhler I'm using an rplidar as my data source. I've updated the issue by including the global costmap config file. A bagfile is currently unavailable. I'm hoping you can find something in the config file. Thanks.
Please don't add a link to a Google Drive or something. This file will go away at some point and one cannot refer to it anymore. Also, it is not searchable. Please edit your question again and paste the relevant content (i.e. get rid of any unnecessary comments) and format the pasted file with the preformatted text button (the on with 1010101 on it)... Thanks
@mgruhler Thanks for the suggestion. I edited the question. Appreciate the help.
Alright, more questions (having a bagfile where the issue is shown would really help :-) )
@mgruhler (Sorry a bagfile is currently unavailable.)
The "ghost readings " appear anywhere in between as shown in the second image highlighted with a few red circles. I do not know why the global costmap puts that there.
The scan messages are highlighted as green dots around the borders of the map or obstacles. From rviz I see no laser scan data at those spots.
The lidar basically measures the distance to any obstacles it encounters. We ignore any readings within a 23 cm radius of the robot and we accept the rest as far as 8 m. Anything over 8 m will also be ignored.