
moveit gripper configruation
Hey there,
I want to pick a part using moveit (ROS on Ubuntu 18.04 - Melodic). I currently use this code (snippet):
moveit::planning_interface::MoveGroupInterface group("kr30_arm");
move_group.pick(partpose.name, my_grasps);
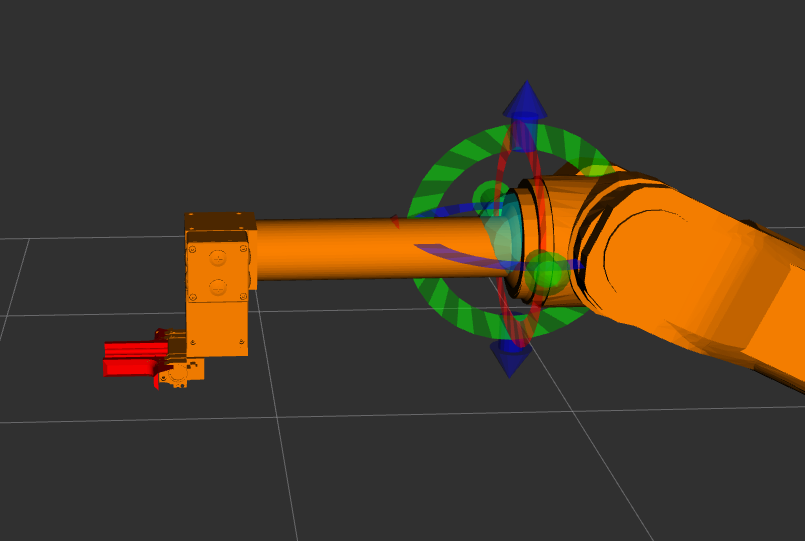
Now my problem is that the robot tries to pick the part at the position of link 6 (image below at the interactive marker). However, I would like to pick the part with the gripper (point between the fingers).
Is there any smart way to achieve this? (Or do I have to transform the position of the part i want to pick with the transformation between my gripper and link6)
add a comment
