RGBDSLAM is a full SLAM approach like GMapping, Cartographer or RTAB-Map. There are many others compatible with ROS too. I will refer you to table 1 of this paper, which does a brief comparison of all available open-source SLAM approaches that can be used in ROS. Here is a copy of that table:
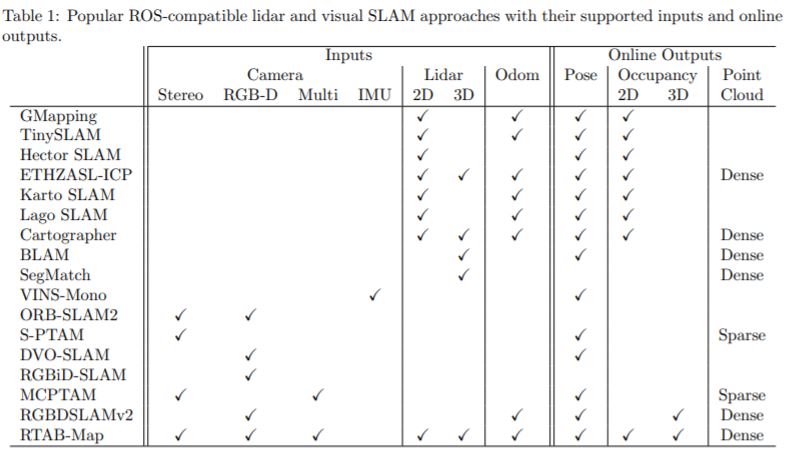
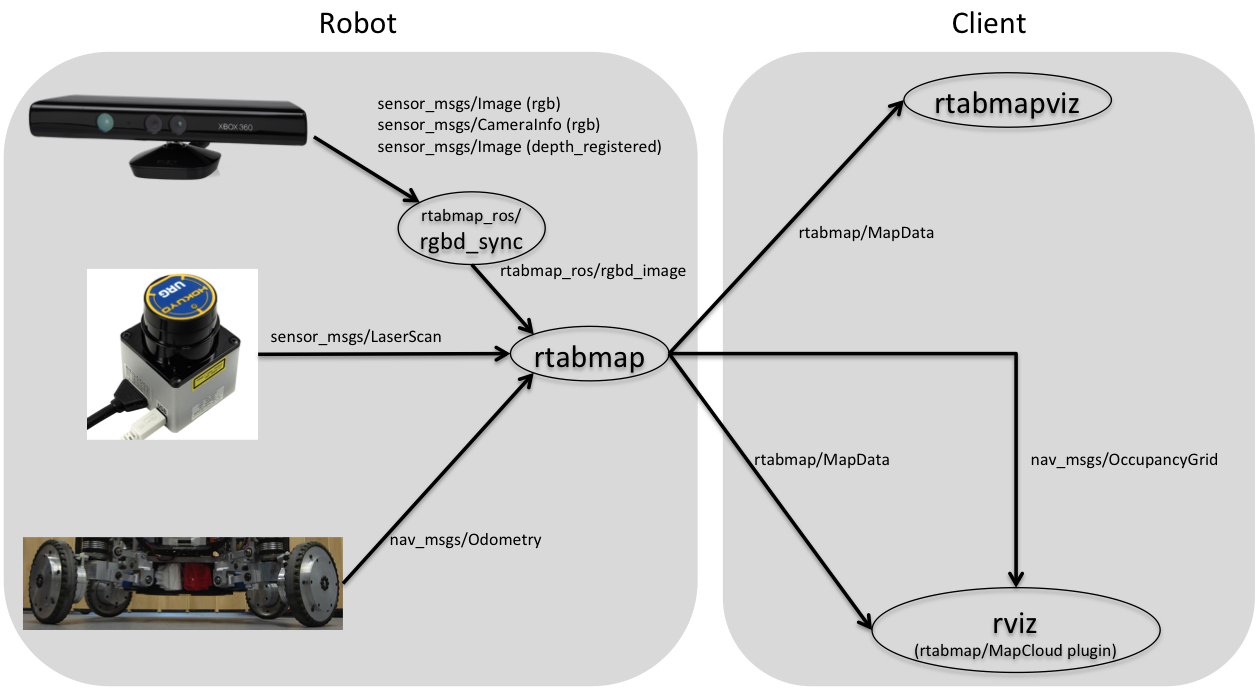
As you can see, depending on the sensors you are using, you would use either a vision-based (RGBD-SLAM) or lidar-based (GMapping, Cartographer) approaches. Currently, only RTAB-Map can use both sensors at the same time. In your case, you won't be able to use the lidar with RGBDSLAM, which uses only RGB-D camera as input. In the same way, you cannot use optimally a RGB-D sensor with GMapping and Cartographer approaches (it is possible to use the depth projection in those approaches but they are more tuned for long-range lidar with large field of view). RGBDSLAM doesn't create a 2D map by default, but a 3D OctoMap. RTAB-Map can use RGB-D camera for loop closure detection, and lidar for 2D mapping. See this configuration example:
In some applications, you could use only a lidar, so GMapping and Cartographer can be other good options.
cheers,
Mathieu


