
Detecting Shapes after Euclidean Clustering

I am trying to detect the geometric shapes based on the data I get from a 2D Laser Scanner.
What I have done so far:
- Get the LaserScan data from Gazebo
- Convert LaserScan to PointCloud
- Use Euclidean Clustering to segment data into clusters
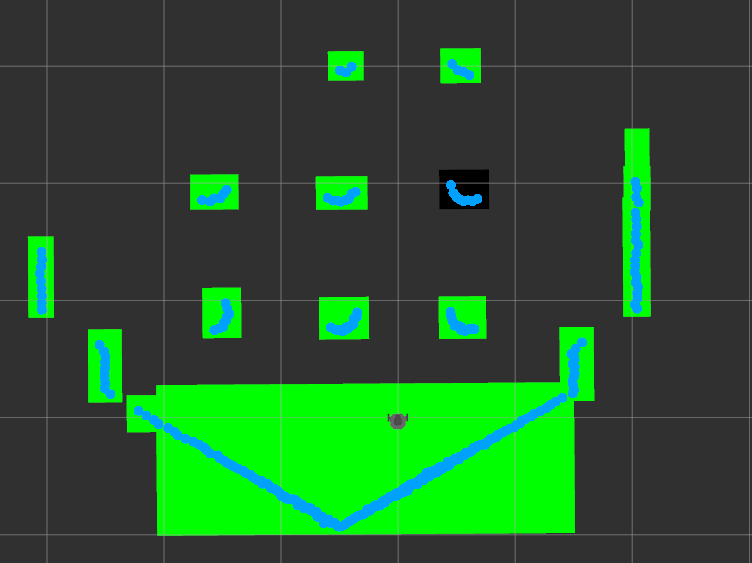
- Put a box around each cluster and publish them with MarkerArray -> Each green rectangle below represents a cluster I get.
What I would like to do right now is to process detected clusters and estimate the shape of them. For example, walls are most likely to give straight lines whereas cylindrical shapes are circular, curved points.
Could anyone suggest a way to go forward from where I am now? Thanks in advance.

were you able to solve it?